






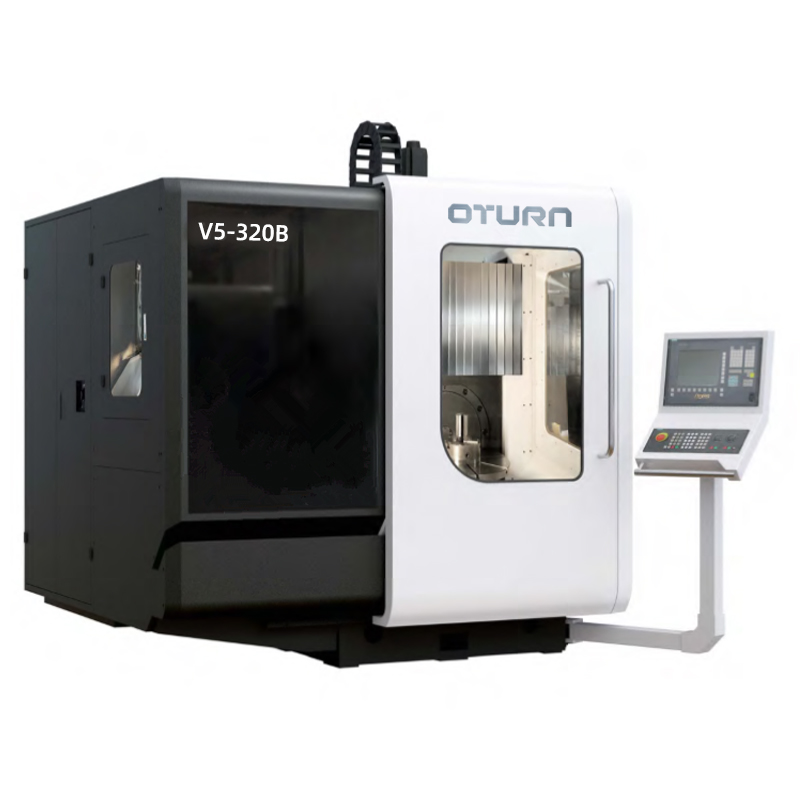
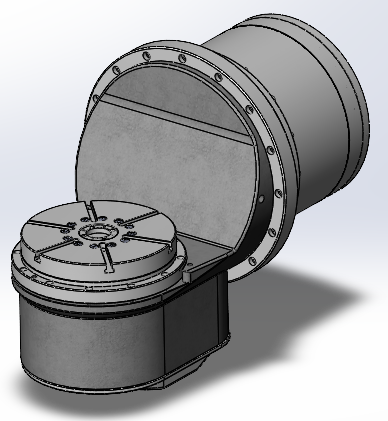
5-Axis Vertical Machining Center V5-320B

1. စက်ကိရိယာ၏ အလုံးစုံ အပြင်အဆင်
V5-320B တွင် ဝင်ရိုးငါးခုရှိသော စက်ယန္တရားစင်တာသည် တည်ငြိမ်သော C ပုံသဏ္ဍာန်ဖွဲ့စည်းပုံကို လက်ခံထားပြီး၊ ကော်လံကို ကုတင်ပေါ်တွင် တပ်ဆင်ထားပြီး၊ ဆလိုက်ပြားသည် ကော်လံ (X ဦးတည်ရာတစ်လျှောက် အလျားလိုက်ရွေ့လျားနေသည်)၊ ဆလိုက်ထိုင်ခုံသည် ဆလိုက်ပြားတစ်လျှောက် အလျားလိုက်ရွေ့လျားသည် (Y ဦးတည်ချက် ) နှင့် headstock သည် slide seat (Z direction) တစ်လျှောက် ဒေါင်လိုက်ရွေ့လျားသည်။ အလုပ်စားပွဲသည် ကိုယ်တိုင်တီထွင်ထားသော တိုက်ရိုက်-ဒရိုက်လက်တစ်လက်လက်မောင်းပုခက်ဖွဲ့စည်းပုံကို လက်ခံထားပြီး ၎င်း၏ အမျိုးမျိုးသော စွမ်းဆောင်ရည်အညွှန်းကိန်းများသည် နိုင်ငံတကာအဆင့်မြင့်အဆင့်သို့ ရောက်ရှိသွားပါသည်။
2. အစာကျွေးခြင်းစနစ်
X၊ Y၊ Z-axis linear guide rails နှင့် ball screws၊ သေးငယ်သော dynamic နှင့် static friction၊ high sensitivity၊ အသေးစား မြန်နှုန်းမြင့်တုန်ခါမှု၊ နိမ့်သောအမြန်နှုန်းတွင် တွားသွားခြင်းမရှိပါ၊ မြင့်မားသောနေရာချထားမှုတိကျမှုနှင့် အလွန်ကောင်းမွန်သော servo drive စွမ်းဆောင်ရည်။
X၊ Y၊ Z-axis servo motors များသည် couplings များဖြင့် တိကျသော ဘောလုံးဝက်အူများနှင့် တိုက်ရိုက်ချိတ်ဆက်ထားပြီး အလယ်အလတ်လင့်ခ်များကို လျှော့ချခြင်း၊ ကွက်လပ်မရှိသော ဂီယာများကို သိရှိနားလည်ခြင်း၊ လိုက်လျောညီထွေရှိသော အစာကျွေးခြင်း၊ တိကျသောနေရာချထားခြင်းနှင့် မြင့်မားသော ဂီယာတိကျခြင်းတို့ဖြစ်သည်။
Z-axis ဆာဗာမော်တာတွင် ဘရိတ်လုပ်ဆောင်ချက် ပါရှိသည်။ ပါဝါချို့ယွင်းသောအခါတွင် ဘရိတ်သည် မော်တာရိုးတံကို အလိုအလျောက် တင်းတင်းကြပ်ကြပ် ဆုပ်ကိုင်ထားနိုင်ပြီး ဘေးကင်းရေး အကာအကွယ်၏ အခန်းကဏ္ဍမှ ပါဝင်သောကြောင့် လှည့်၍မရပေ။
3. လျှပ်စစ်ဗိုင်းလိပ်တံ
လျှပ်စစ်ဗိုင်းလိပ်တံသည် ကိုယ်တိုင်တီထွင်ထုတ်လုပ်ထားသော စွမ်းဆောင်ရည်မြင့်လျှပ်စစ်ဗိုင်းလိပ်တံ (တီထွင်မှုမူပိုင်ခွင့်- 202010130049.4) ကို လက်ခံရရှိပြီး အဆုံးတွင် ကိရိယာကို အေးစေရန် အအေးပေးသည့် နော်ဇယ်များ တပ်ဆင်ထားပါသည်။ ၎င်းတွင် မြင့်မားသော မြန်နှုန်း၊ တိကျမှု နှင့် မြင့်မားသော တက်ကြွသော တုံ့ပြန်မှုတို့ ၏ အားသာချက်များ ရှိပြီး အဆင့်မရှိသော အမြန်နှုန်း စည်းမျဉ်းကို သိရှိနိုင်သည်။ Built-in High-precision encoder သည် ဦးတည်ချက်တိကျသောရပ်တန့်မှုနှင့် တင်းကျပ်စွာထိခြင်းတို့ကို သိရှိနိုင်သည်။

4. Tool မဂ္ဂဇင်း
BT40 disc အမျိုးအစား တူးလ်မဂ္ဂဇင်း၊ ကိရိယာ ရာထူး ၂၄ ခု၊ ATC ခြယ်လှယ်မှု အလိုအလျောက် ပြောင်းလဲခြင်း
အောက်တွင်ကြည့်ပါ:

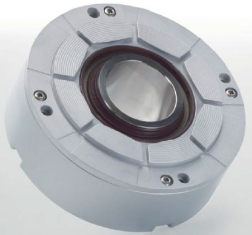
5. စားပွဲဝိုင်း
၎င်းသည် မြင့်မားသော တောင့်တင်းမှု၊ တိကျမှုနှင့် မြင့်မားသော တက်ကြွတုံ့ပြန်မှု၏ အားသာချက်များပါရှိသော ကိုယ်တိုင်တီထွင်ထားသော တိုက်ရိုက်-ဒရိုက်တစ်ချက်-လက်မောင်းပုခက်တည်ဆောက်ပုံကို လက်ခံပါသည်။
| ဝင်ရိုး | အဆင့်သတ်မှတ်ထားသော Torque Nm | အမြန်နှုန်း rpm အဆင့်သတ်မှတ်ထားသည်။ | မက်တယ်။ အမြန်နှုန်း rpm | လက်ရှိ A အဆင့်သတ်မှတ်ထားသည်။ | အဆင့်သတ်မှတ်ပါဝါ kW |
| B | ၆၅၆ | 80 | ၁၀၀ | 18 | ၅.၅ |
| C | ၁၇၂ | ၁၀၀ | ၁၃၀ | ၆.၁ | ၁.၈ |
6. အပြည့်အ၀ ပိတ်ထားသော ကွင်းဆက်တုံ့ပြန်မှုစနစ်
X၊ Y နှင့် Z linear axes များကို HEIDENHAIN LC4 စီးရီး ပကတိတန်ဖိုး ဆန်ခါစကေးများ တပ်ဆင်ထားပါသည်။ B နှင့် C rotary tables များတွင် HEIDENHAIN RCN2000 series absolute value angle encoders များ တပ်ဆင်ထားပြီး feed axes 5 ခု၏ full-closed-loop feedback ကို သိရှိနိုင်ရန်၊ စက်ကိရိယာသည် တိကျပြီး မြင့်မားသောတိကျမှုရှိကြောင်း သေချာစေပါသည်။ တိကျမှုကို ထိန်းသိမ်းခြင်း။

7. အအေးခံခြင်းနှင့် pneumatic စနစ်
လျှပ်စစ် spindle နှင့် direct drive turntable တို့သည် ကောင်းမွန်စွာ အလုပ်လုပ်နိုင်ပြီး အချိန်ကြာမြင့်စွာ ထိထိရောက်ရောက် လည်ပတ်နိုင်ကြောင်း သေချာစေရန် စဉ်ဆက်မပြတ် အပူချိန်အအေးပေးရန်အတွက် ရေအေးပေးစက်ကို တပ်ဆင်ထားသည်။
ပင်မရိုးတံ၏ သေးငယ်သောအပေါက်ကို သန့်ရှင်းရေးနှင့်မှုတ်ခြင်း၏လုပ်ငန်းဆောင်တာများကို သိရှိနားလည်ရန်၊ ပင်မရိုးတံကို လေလုံအောင်ပိတ်ခြင်းမှ ကာကွယ်ခြင်း၊ ကိရိယာမဂ္ဂဇင်းနှင့် ကိရိယာကိုင်ဆောင်သူအား လှန်ခြင်းတို့ကို သိရှိရန် pneumatic စနစ်အား အမှုန်အမွှားများဖြင့် စစ်ထုတ်ထားပါသည်။
8. Centralized ချောဆီစနစ်
ပဲ့ထိန်းရထားလမ်း၏လျှောဘလောက်နှင့်ဘောလုံးဝက်အူ၏အခွံမာသီးသည် ပါးလွှာသောအဆီဖြင့်ဗဟိုချုပ်ကိုင်ထားသောချောဆီစက်ကိုအသုံးပြုထားပြီးဘောလုံးဝက်အူနှင့်လမ်းညွှန်ရထားလမ်း၏တိကျမှုနှင့်တည်ငြိမ်မှုရှိစေရန်ပုံမှန်နှင့်အရေအတွက်များသောချောဆီပေးဆောင်သည်။
9. Workpiece တိုင်းတာခြင်းစနစ်
စက်ကိရိယာတွင် HEIDENHAIN TS460 touch probe နှင့် wireless signal receiver တပ်ဆင်ထားပြီး၊ workpiece alignment၊ workpiece measurement နှင့် preset point setting တို့၏ လုပ်ဆောင်ချက်များကို သိရှိနားလည်နိုင်ရန် manual သို့မဟုတ် အလိုအလျောက် tool change system မှတဆင့် spindle ပေါ်တွင် တပ်ဆင်ထားနိုင်ပြီး၊ 1um (စမ်းသပ်မှုအမြန်နှုန်း 1 m/min)၊ အလုပ်လုပ်သည့်အပူချိန်မှာ 10°C မှ 40°C ဖြစ်သည်။ HEIDENHAIN touch probe ကို optical switch ဖြင့် အစပျိုးသည်။ စံပြလွတ်လပ်သောအနေအထားကိုသေချာစေရန် Stylus သည် 3-point bearing ကိုအသုံးပြုသည်။ ၎င်းသည် အသုံးပြုနေစဉ်အတွင်း ဝတ်ဆင်ခြင်းမရှိဘဲ၊ တသမတ်တည်း ထပ်တလဲလဲလုပ်ဆောင်နိုင်ပြီး အချိန်ကြာမြင့်စွာ တည်ငြိမ်သည်။


10. Tool တိုင်းတာခြင်းစနစ်
စက်ကိရိယာတွင် Renishaw NC4 လေဆာကိရိယာ ဆက်တင်ကိရိယာ တပ်ဆင်ထားပြီး၊ တိုင်းတာခြင်း ထပ်တလဲလဲနိုင်မှုမှာ ± 0.1 မီလီမီတာဖြစ်ပြီး အလုပ်လုပ်သည့်အပူချိန်မှာ 5°C မှ 50°C ဖြစ်သည်။
11. ဝင်ရိုးငါးခု တိကျစွာ ချိန်ညှိခြင်း။
စက်ကိရိယာသည် HEIDENHAIN မှ KKH စံကိုက်ချိန်ညှိဘောလုံးများနှင့်အတူ TS series probes များနှင့်အတူ၊ စက်ကိရိယာလည်ပတ်ဝင်ရိုး၏တိကျစွာချိန်ညှိခြင်းအောင်မြင်ရန်၊ စက်ကိရိယာလှုပ်ရှားမှုအတွင်း အမှားအယွင်းများကိုလျှော့ချရန်နှင့် မြင့်မားသောတိကျမှုနှင့် ထပ်တလဲလဲလုပ်ဆောင်နိုင်မှုတို့ကိုရရှိစေရန်အတွက် စက်ကိရိယာတွင် တပ်ဆင်ထားသည်။

12. စက်ကိရိယာကာကွယ်ရေး
စက်ကိရိယာသည် အအေးခံခြင်းနှင့် ချစ်ပ်များ အက်ကွဲခြင်းမှကာကွယ်ရန်၊ ဘေးကင်းသောလည်ပတ်မှုကိုသေချာစေပြီး သာယာသောအသွင်အပြင်ကိုရရှိစေရန် ဘေးကင်းရေးစံနှုန်းများနှင့်ကိုက်ညီသည့် အကာအကွယ်အဖုံးကို လက်ခံပါသည်။ စက်ကိရိယာ၏ X ဦးတည်ချက်တွင် လမ်းညွှန်ရထားလမ်းနှင့် ဘောလုံးဝက်အူတို့ကို ထိထိရောက်ရောက်ကာကွယ်ပေးနိုင်သည့် သံချပ်ကာဒိုင်းတစ်ခု တပ်ဆင်ထားသည်။
13. စက်ကိရိယာလုပ်ငန်းခွင်အခြေအနေများ
(1) ပါဝါထောက်ပံ့မှု- 380V±10% 50HZ±1HZ သုံးဆင့် AC
(၂) ပတ်ဝန်းကျင်အပူချိန် 5°C-40°C
(၃) အကောင်းဆုံးအပူချိန် 22°C-24°C
(၄) နှိုင်းရစိုထိုင်းဆ- 20-75%
(5) လေအရင်းအမြစ်ဖိအား: ≥6 bar
(6) ဓာတ်ငွေ့ရင်းမြစ်စီးဆင်းမှုနှုန်း 500 L/min
14. CNC စနစ်၏လုပ်ဆောင်ချက်မိတ်ဆက်

HEIDENHAIN TNC640 CNC စနစ်
(1) axes အရေအတွက်- ထိန်းချုပ်မှု 24 ခုအထိ
(၂) ထိတွေ့မှုပေါင်းများစွာ လုပ်ဆောင်နိုင်သော မျက်နှာပြင်ဗားရှင်း
(၃) ပရိုဂရမ်ထည့်သွင်းခြင်း- Klartext စကားပြောဆိုမှုနှင့် G ကုဒ် (ISO) ပရိုဂရမ်ရေးဆွဲခြင်း။
(4) FK free contour programming- ဂရပ်ဖစ်ပံ့ပိုးမှုဖြင့် FK free contour programming ကို လုပ်ဆောင်ရန် Klartext စကားပြောဆိုမှု ပရိုဂရမ်းမင်းဘာသာစကားကို အသုံးပြုပါ။
(၅) ကြိတ်ခွဲခြင်းနှင့် တူးဖော်ခြင်း စက်ဝန်းများ ပေါများခြင်း။
(၆) ကိရိယာလျော်ကြေး- ကိရိယာအချင်းဝက် လျော်ကြေးငွေနှင့် ကိရိယာ အရှည်လျော်ကြေး။ သံသရာ
(၇) ဒေတာဖြတ်တောက်ခြင်း- ဗိုင်းလိပ်တံအမြန်နှုန်း၊ ဖြတ်တောက်မှုအမြန်နှုန်း၊ ဓါးတစ်ချောင်းစာနှင့် စက်ဝိုင်းတစ်ခုစီအတွက် အစာကို အလိုအလျောက် တွက်ချက်ခြင်း
(8) Constant contour processing speed- tool center ၏ လမ်းကြောင်း / tool edge နှင့် ဆက်စပ်မှု
(၉) Parallel Run: အခြားပရိုဂရမ်တစ်ခု လုပ်ဆောင်နေချိန်တွင် ဂရပ်ဖစ်ပံ့ပိုးမှုရှိသော ပရိုဂရမ်
(10) ကွန်တိုဒြပ်စင်များ- မျဉ်းဖြောင့်/ chamfer/ arc လမ်းကြောင်း/ စက်ဝိုင်းဗဟို/ စက်ဝိုင်းအချင်းဝက်/ tangentially ချိတ်ဆက်ထားသော arc/ လုံးဝန်းသောထောင့်
(၁၁) မျဉ်းကြောင်းများမှ ချဉ်းကပ်ခြင်းနှင့် ထွက်သွားခြင်း- tangential သို့မဟုတ် perpendicular/ arc လမ်းကြောင်းများမှတဆင့်၊
(12) ပရိုဂရမ်ခုန်ခြင်း- လုပ်ရိုးလုပ်စဉ်ခွဲ/ပရိုဂရမ်ကို ပိတ်ဆို့ခြင်း/ မည်သည့်ပရိုဂရမ်မဆို လုပ်ရိုးလုပ်စဉ်တစ်ခု ဖြစ်နိုင်သည်။
(၁၃) စည်သွတ်စက်ဝန်း- တူးဖော်ခြင်း၊ ပုတ်ခြင်း (မျောပါသော ပုတ်ဘောင်ဖြင့် သို့မဟုတ် မပါဘဲ)၊ စတုဂံပုံနှင့် အဝိုင်းပုံပေါက်ခြင်း။ Peck တူးဖော်ခြင်း၊ ဖမ်းခြင်း၊ ငြီးငွေ့ဖွယ်ကောင်းသော အစက်အပြောက်များကို မျက်နှာမူခြင်း၊ အစက်အပြောက်တူးဖော်ခြင်း။ အတွင်းနှင့် ပြင်ပချည်များကို ကြိတ်ခွဲခြင်း။ ညီညာသော မျက်နှာပြင်များ ကြမ်းတမ်းခြင်း။ ထောင့်မှန်စတုဂံနှင့် စက်ဝိုင်းပုံအိတ်များ၊ ဖြောင့် နှင့် စက်ဝိုင်းပုံ grooves များအတွက် ကြမ်းတမ်းခြင်းနှင့် ပြီးဆုံးခြင်း စက်ဝန်းများ။ စက်ဝိုင်းများနှင့် လိုင်းများပေါ်ရှိ Array အမှတ်များ။ Array အမှတ်- QR ကုဒ်။ ကွန်တိုကွင်းဆက်၊ ကွန်တိုအိတ်ကပ်။ trochoidal ကြိတ်ခြင်းအတွက် ကွန်တိုအကွက်။ ထွင်းထုသည့်စက်ဝန်း- မျဉ်းဖြောင့် သို့မဟုတ် အကွေးတစ်လျှောက်တွင် စာသား သို့မဟုတ် နံပါတ်များကို ထွင်းထုပါ။
(14) Coordinate transformation : ဘာသာပြန်ခြင်း၊ လည်ပတ်ခြင်း၊ အလင်းပြန်ခြင်း၊ စကေးချဲ့ခြင်း (သတ်မှတ်ဝင်ရိုးများ)။
(15) Q ပါရာမီတာ ပြောင်းလဲနိုင်သော ပရိုဂရမ်ရေးဆွဲခြင်း- သင်္ချာလုပ်ဆောင်ချက်၊ ယုတ္တိရှိသော လည်ပတ်ဆောင်ရွက်မှု၊ စကားချပ် လုပ်ဆောင်ချက်၊ ပကတိတန်ဖိုး၊ ကိန်းသေ þ၊ နုတ်ပယ်ခြင်း၊ ကိန်းပြည့် သို့မဟုတ် ဒဿမ၊ စက်ဝိုင်းတွက်ချက်မှု လုပ်ဆောင်ချက်၊ စာသားလုပ်ဆောင်ခြင်း လုပ်ဆောင်ချက်။
(16) Programming aids: ဂဏန်းပေါင်းစက်။ လက်ရှိ အမှားအယွင်း မက်ဆေ့ချ်အားလုံး၏ စာရင်း။ အမှားအယွင်း မက်ဆေ့ချ်များအတွက် ဆက်စပ်မှု-ထိခိုက်လွယ်သော အကူအညီ လုပ်ဆောင်ချက်။ TNCguide- ပေါင်းစပ်အကူအညီစနစ်၊ TNC 640 သည် သုံးစွဲသူလက်စွဲမှ အချက်အလက်များကို တိုက်ရိုက်ပြသသည်။ သံသရာပရိုဂရမ်းမင်းအတွက် ဂရပ်ဖစ်ပံ့ပိုးမှု။ NC ပရိုဂရမ်များတွင် မှတ်ချက်ပိတ်ပင်မှုများနှင့် ပင်မလုပ်ကွက်များ။
(၁၇) သတင်းအချက်အလက်ရယူခြင်း- NC ပရိုဂရမ်တွင် အမှန်တကယ် အနေအထားကို တိုက်ရိုက်အသုံးပြုခြင်း။
(18) ပရိုဂရမ်အတည်ပြုခြင်းဂရပ်ဖစ်- အခြားပရိုဂရမ်တစ်ခုလုပ်ဆောင်နေချိန်၌ပင် စက်ပိုင်းဆိုင်ရာလုပ်ဆောင်မှုများကို ဂရပ်ဖစ်ပုံစံတူခြင်းလုပ်ဆောင်နိုင်သည်။ ထိပ်တန်းမြင်ကွင်း/ သုံးဖက်မြင် မြင်ကွင်း/ စတီရီယို မြင်ကွင်း နှင့် ညှို့ယူလုပ်ဆောင်နေသော လေယာဉ်/ 3-D မျဉ်းကြောင်းဆွဲခြင်း။ ဒေသဆိုင်ရာ အတိုင်းအတာ။
(19) ပရိုဂရမ်းမင်းဂရပ်ဖစ်ပံ့ပိုးမှု- အခြားပရိုဂရမ်တစ်ခုလုပ်ဆောင်နေသော်လည်း၊ ထည့်သွင်းသည့် NC ပရိုဂရမ်အပိုင်း၏ ဂရပ်ဖစ် (2-D လက်ရေးခြေရာကောက်မြေပုံ) ကို ပရိုဂရမ်တည်းဖြတ်သည့်လုပ်ဆောင်ချက်မုဒ်တွင် ပြသနိုင်သည်။
(20) ဂရပ်ဖစ်လည်ပတ်သည့်ပရိုဂရမ်- ကြိတ်ခြင်းပရိုဂရမ်ကို လုပ်ဆောင်နေစဉ် အချိန်နှင့်တစ်ပြေးညီ ဂရပ်ဖစ်ပုံတူခြင်း ထိပ်တန်းမြင်ကွင်း/သုံးမြင်ကွင်း/စတီရီယိုမြင်ကွင်း။
(21) လုပ်ဆောင်ချိန်- "test run" လည်ပတ်မှုမုဒ်တွင် လုပ်ဆောင်ချိန်ကို တွက်ချက်ပါ။ "Program Run" လည်ပတ်မှုမုဒ်တွင် လက်ရှိ စက်ပစ္စည်းအချိန်ကို ပြသသည်။
(22) အသွင်အပြင်သို့ပြန်သွားပါ- "ပရိုဂရမ်လည်ပတ်နေသည်" လုပ်ဆောင်ချက်မုဒ်တွင် လက်ရှိလုပ်ဆောင်နေသည့်အချိန်ကို ပြသပါ။ ပရိုဂရမ်ပြတ်တောက်ခြင်း၊ ထွက်ခွာခြင်းနှင့် အသွင်အပြင်သို့ ပြန်သွားခြင်း။
(၂၃) ကြိုတင်သတ်မှတ်မှတ်စီမံခန့်ခွဲမှု- မည်သည့် ကြိုတင်သတ်မှတ်မှတ်ကိုမဆို သိမ်းဆည်းရန် ဇယား။
(24) ဇာစ်မြစ်ဇယား- လက်ရာမြောက်သောဇာစ်မြစ်ကို သိမ်းဆည်းရန်အတွက် အသုံးပြုသည့် ဇာစ်မြစ်မျိုးစုံ ဇယားများ။
(25) 3-D Machining: အရည်အသွေးမြင့် Smooth Jerk ၏ ရွေ့လျားမှုကို ထိန်းချုပ်ခြင်း။
(26) Block processing time: 0.5 ms
(27) Input resolution နှင့် display အဆင့်- 0.1 μm
(28) Measuring cycle : probe calibration ။ workpiece misalignment ကို manual သို့မဟုတ် အလိုအလျောက် လျော်ကြေးပေးခြင်း။ ကြိုတင်သတ်မှတ်မှတ်များကို ကိုယ်တိုင် သို့မဟုတ် အလိုအလျောက် သတ်မှတ်ပါ။ Tool နှင့် workpiece ကို အလိုအလျောက် တိုင်းတာနိုင်သည်။
(၂၉) အမှားလျော်ကြေးပေးခြင်း- linear and nonlinear axis error၊ backlash, reverse sharp angle of circular motion, reverse error, thermal expansion. static friction, sliding friction.
(30) ဒေတာ အင်တာဖေ့စ်- RS-232-C/V.24၊ 115 kbit/s အထိ။ LSV2 ပရိုတိုကော၏ တိုးချဲ့ထားသော ဒေတာအင်တာဖေ့စ်၊ ဤဒေတာအင်တာဖေ့စ်မှတစ်ဆင့် TNC ကို အဝေးမှလုပ်ဆောင်ရန် HEIDENHAIN TNCremo သို့မဟုတ် TNCremoPlus ဆော့ဖ်ဝဲလ်ကို အသုံးပြုပါ။ 2 x Gigabit Ethernet 1000BASE-T အင်တာဖေ့စ်။ 5 x USB ပေါက်များ (အရှေ့ဘက် USB 2.0 ပေါက် ၁ ခု၊ USB 3.0 ပေါက် ၄ ခု)။
(၃၁) ရောဂါရှာဖွေခြင်း- အမြန်နှင့် အဆင်ပြေသည့် ပြဿနာဖြေရှင်းခြင်းအတွက် ကိုယ်တိုင်ပါရှိသော ရောဂါရှာဖွေရေးကိရိယာများ။
(32) CAD စာဖတ်သူ- စံ CAD ဖော်မတ်ဖိုင်များကို ပြသပါ။
အဓိက ကန့်သတ်ချက်
| ကုသိုလ်ကံ | ယူနစ် | ကန့်သတ်ချက် | |
| အလုပ်စားပွဲ | အလုပ်စားပွဲအချင်း | mm | ၃၂၀ |
| အလျားလိုက် အမြင့်ဆုံးဝန် | kg | ၁၅၀ | |
| အများဆုံးဒေါင်လိုက်ဝန် | kg | ၁၀၀ | |
| T-အထိုင် | mm | 8X10H8 | |
| ဆောင်ရွက်ဆဲအပိုင်း | spindle end face နှင့် worktable end face အကြားအကွာအဝေး (Max) | mm | ၄၃၀ |
| spindle end face နှင့် worktable end face ကြားအကွာအဝေး (Min) | mm | ၁၀၀ | |
| X ဝင်ရိုး | mm | ၄၅၀ | |
| Y ဝင်ရိုး | mm | ၃၂၀ | |
| Z ဝင်ရိုး | mm | ၃၃၀ | |
| B ဝင်ရိုး | ° | -35°~+ 110° | |
| C ဝင်ရိုး | ° | 360° | |
| ဗိုင်းလိပ်တံ | Taper (7 ∶ 24) |
| BT40 |
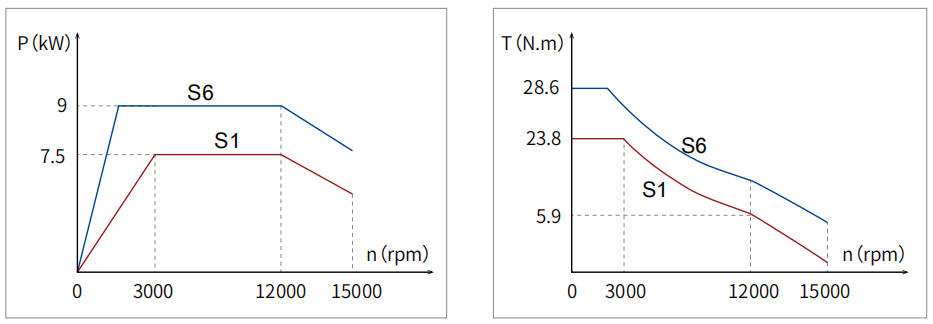
| အဆင့်သတ်မှတ်ထားသော မြန်နှုန်း | rpm | ၃၀၀၀ | |
| မက်တယ်။ အရှိန် | rpm | ၁၅၀၀၀ | |
| အဆင့်သတ်မှတ်ထားသော torque S1 | ကမ္မဿကာ | ၂၃.၈ | |
| ပါဝါ S1 အဆင့်သတ်မှတ်ထားသည်။ | KW | ၇.၅ | |
|
ဝင်ရိုး | X ဝင်ရိုး အရှိန်အဟုန်ဖြင့် ဖြတ်သွားသော အမြန်နှုန်း | m/min | 36 |
| Y ဝင်ရိုး အရှိန်အဟုန်ဖြင့် ဖြတ်သွားသော အမြန်နှုန်း | m/min | 36 | |
| Z ဝင်ရိုး အမြန်လမ်းကြောင်း | m/min | 36 | |
| B ဝင်ရိုး Max ။ အရှိန် | rpm | ၁၃၀ | |
| C ဝင်ရိုး Max ။ အရှိန် | rpm | ၁၃၀ | |
| Tool မဂ္ဂဇင်း | ရိုက်ပါ။ |
| Disc အမျိုးအစား |
| ကိရိယာရွေးချယ်ရေးနည်းလမ်း |
| အနီးဆုံး ကိရိယာကို နှစ်လမ်းညွန် ရွေးချယ်ခြင်း။ | |
| စွမ်းဆောင်ရည် | T | 24 | |
| မက်တယ်။ tool အရှည် | mm | ၁၅၀ | |
| မက်တယ်။ ကိရိယာအလေးချိန် | kg | 7 | |
| မက်တယ်။ cutter disc အချင်း(ကိရိယာအပြည့်အစုံ) | mm | 80 | |
| အများဆုံး cutter disc အချင်း (ကပ်လျက် ဗလာတူးလ်) | mm | ၁၅၀ | |
| တိကျမှု | အမှုဆောင်စံ |
| GB/T20957.4(ISO10791-4) |
| X-axis/Y-axis/Z-axis နေရာချထားမှု တိကျမှု | mm | ၀.၀၀၈/၀.၀၀၈/၀.၀၀၈ | |
| B-axis/C-axis နေရာချထားမှု တိကျမှု |
| 7"/7" | |
| X-axis/Y-axis/Z-axis သည် ထပ်ခါတလဲလဲ နေရာချထားမှု တိကျမှု | mm | 0.006/0.006/0.006 | |
| B-axis/C-axis သည် ထပ်ခါတလဲလဲ နေရာချထားမှု တိကျမှု |
| 5"/5" | |
| စက်အလေးချိန် | Kg | ၅၀၀၀ | |
| စုစုပေါင်းလျှပ်စစ်စွမ်းရည် | KVA | 45 | |
Standard Configuration List
| မရှိ | နာမည် |
| 1 | အဓိက အစိတ်အပိုင်းများ (ခုတင်၊ ကော်လံ၊ လျှောပြား၊ ဆလိုက်ထိုင်ခုံ၊ ခေါင်းစွပ်အပါအဝင်) |
| ၂ | X၊ Y၊ Z တွင် ဝင်ရိုးသုံးပေါက်စာစနစ် |
| 3 | လက်မောင်းတစ်ခုတည်း လှည့်စားပွဲ |
| 4 | လျှပ်စစ်ဗိုင်းလိပ်တံ BT40 |
| 5 | လျှပ်စစ်ထိန်းချုပ်မှုစနစ် (လျှပ်စစ်ကက်ဘိနက်၊ ပါဝါထောက်ပံ့မှုမော်ဂျူး၊ ဆာဗာမော်ဂျူး၊ PLC၊ လည်ပတ်မှုဘောင်၊ မျက်နှာပြင်ပြသမှု၊ လက်ကိုင်ယူနစ်၊ လျှပ်စစ်ဗီဇသုံးလေအေးပေးစက် စသည်ဖြင့်) |
| 6 | ဆန်ခါစကေး- HEIDENHAIN |
| 7 | ဟိုက်ဒရောလစ်စနစ် |
| 8 | Pneumatic စနစ် |
| 9 | Centralized ချောဆီစနစ် |
| 10 | Chip conveyor၊ ရေတိုင်ကီ၊ ချစ်ပ်စုဆောင်းသူ |
| 11 | ရထားစောင့် |
| 12 | စက်ကိရိယာတစ်ခုလုံး အကာအကွယ်အဖုံး |
| 13 | အလုပ်အပိုင်း တိုင်းကိရိယာ- HEIDENHAIN TS460 |
|
| တစ်ပြေးညီအကြေးခွံ HEIDENHAIN |
| 14 | ကိရိယာ ဆက်တင် ကိရိယာ- HEIDENHAIN NC4 |
| 15 | ဝင်ရိုးငါးခု တိကျစွာ ချိန်ညှိခြင်း- HEIDENHAIN KKH |
| 16 | HPMILL ဆော့ဖ်ဝဲကို လုပ်ဆောင်ပြီးနောက် အသုံးပြုသည့် အချက်တစ်ချက်အပေါ် အခြေခံ၍ ကွန်ပျူတာ၏ ရုပ်ပိုင်းဆိုင်ရာ လိပ်စာကို စည်းပါ။ |
| 17 | Spindle အပူ elongation လျော်ကြေးပေးခြင်း function ကို |






