V5-1000A 5-ဝင်ရိုး စက်ယန္တရားစင်တာ
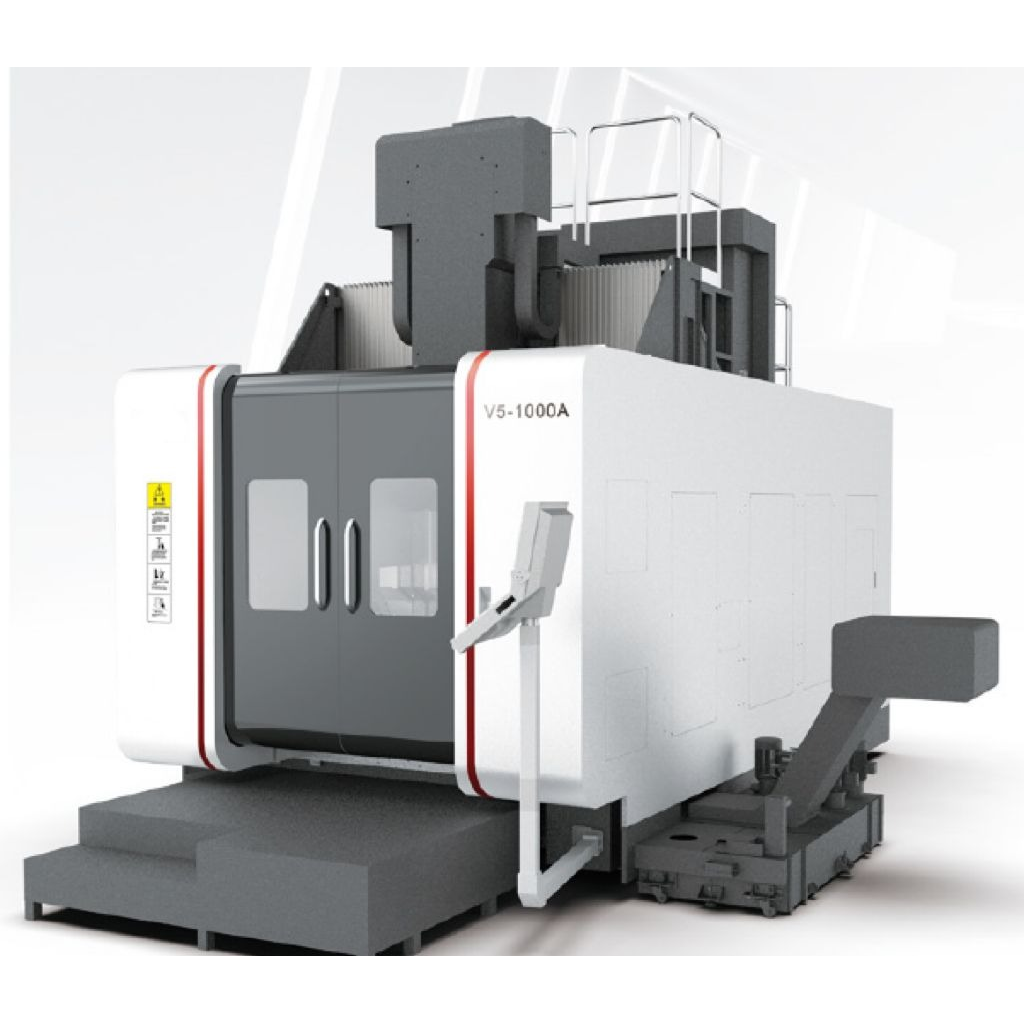
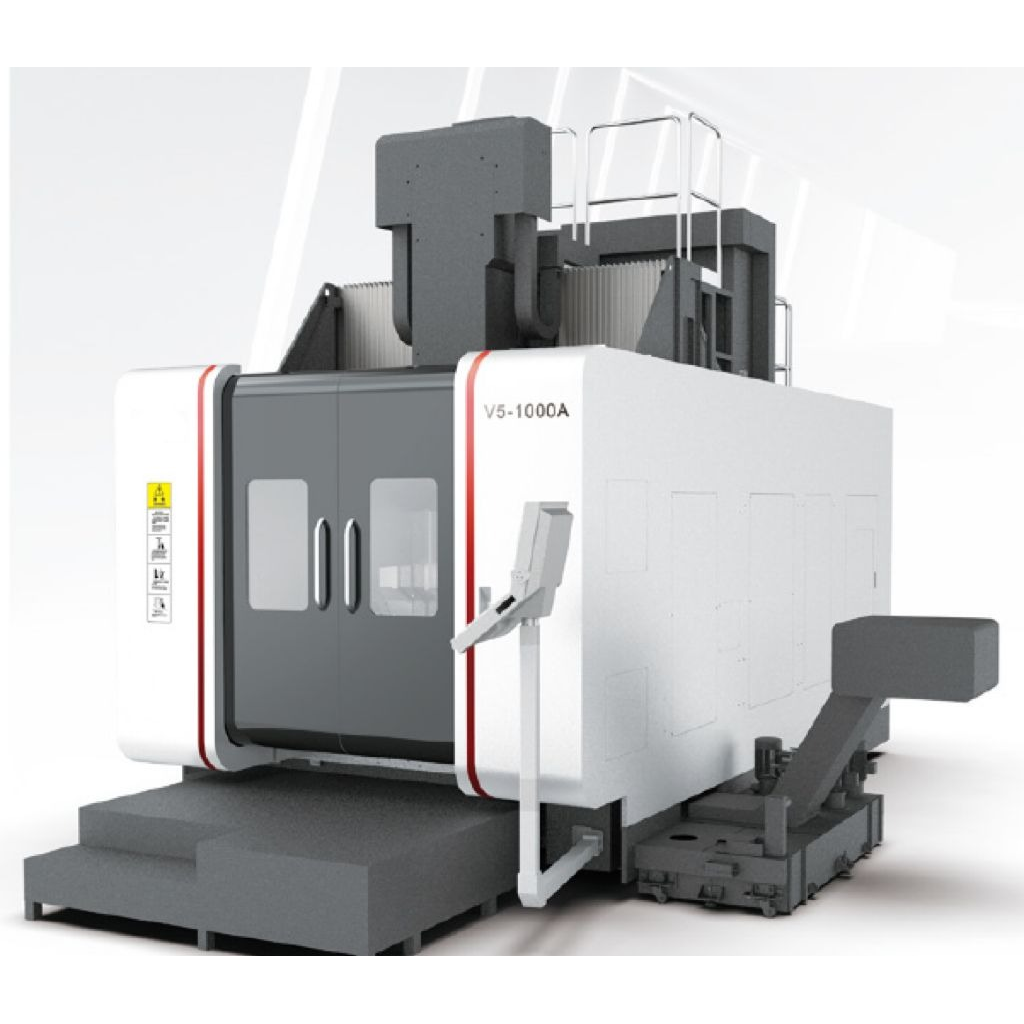
Five-Axis Vertical Machining Center
V5-1000A ငါးဝင်ရိုးစက်ယန္တရားစင်တာသည် တည်ငြိမ်သောအပိတ် gantry ဖွဲ့စည်းပုံကိုလက်ခံပြီး စံလျှပ်စစ်ဗိုင်းလိပ်တံ၊ ဝင်ရိုးနှစ်ချောင်းတိုက်ရိုက်-ဒရိုက် CNC လှည့်စားပွဲနှင့် ရေပြင်ညီကွင်းဆက်ဆာဗာတူးလ်မဂ္ဂဇင်းတို့ တပ်ဆင်ထားသည်။၎င်းသည် ရှုပ်ထွေးသော အစိတ်အပိုင်းများကို မြန်နှုန်းမြင့်၊ တိကျမှုမြင့်မားပြီး ထိရောက်စွာ ပုံဖော်နိုင်သည် ။၎င်းကို စွမ်းအင်သုံးယာဉ်အသစ်များထုတ်လုပ်ခြင်း၊ လေကြောင်းဆိုင်ရာ အစိတ်အပိုင်းတစ်ခုဖြစ်သည့် blisks၊ ရေနွေးငွေ့တာဘိုင်ပန်ကာများ၊ မှိုများနှင့် အခြားထုတ်ကုန်များတွင် တွင်ကျယ်စွာအသုံးပြုပါသည်။
1. စက်၏ အလုံးစုံ အပြင်အဆင်
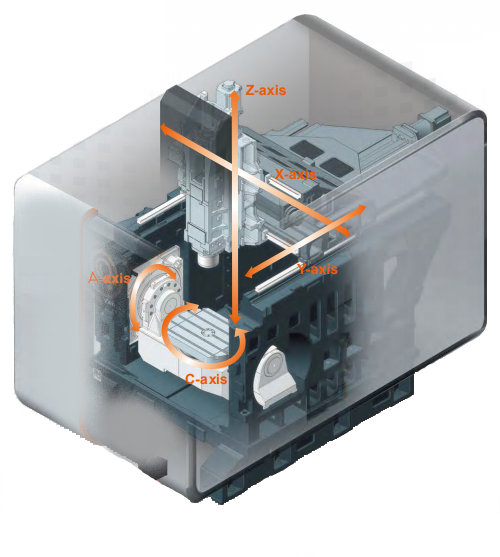
V5-1000A ငါးဝင်ရိုး စက်ယန္တရားစင်တာသည် တည်ငြိမ်သော gantry ဖွဲ့စည်းပုံကို လက်ခံသည်၊ ကော်လံကို အောက်ခြေတွင် တပ်ဆင်ထားပြီး၊ အလင်းတန်းသည် ကော်လံ (Y ဦးတည်ရာတစ်လျှောက် အလျားလိုက်ရွေ့လျားနေသည်)၊ ဆလိုက်ပြားသည် အလင်းတန်းတစ်လျှောက် ဘေးတိုက်ရွေ့လျားနေပြီး၊ headstock သည် slide plate (Z direction) တစ်လျှောက် ဒေါင်လိုက်ရွေ့လျားသည်။workbench သည် ကိုယ်တိုင်တီထွင်ထားသော direct-drive cradle ဖွဲ့စည်းပုံကို လက်ခံပြီး အမျိုးမျိုးသော စွမ်းဆောင်ရည် အညွှန်းကိန်းများသည် နိုင်ငံတကာအဆင့်မြင့်အဆင့်သို့ ရောက်ရှိသွားပါသည်။
2. အစာကျွေးစနစ်
X၊ Y၊ Z axes များသည် အလွန်တောင့်တင်းခိုင်မာမှု၊ တိကျမှုမြင့်မားသော roller linear လမ်းညွှန်များနှင့် စွမ်းဆောင်ရည်မြင့်မားသော ဘောလုံးဝက်အူများ၊ ရွေ့လျားမှုနှင့် တည်ငြိမ်သောပွတ်တိုက်မှုနည်းသော၊ မြင့်မားသော အာရုံခံနိုင်စွမ်း၊ တုန်ခါမှုနည်းသော မြန်နှုန်းမြင့်၊ နိမ့်သောအမြန်နှုန်းတွင် ရုန်းမထွက်နိုင်၊ မြင့်မားသောနေရာချထားမှု တိကျမှုနှင့် အလွန်ကောင်းမွန်သော servo drive စွမ်းဆောင်ရည်။
X၊ Y၊ Z ဝင်ရိုးဆာဗာမော်တာများသည် တိကျသောအလျှော့ပေးသူများမှတဆင့် မြင့်မားသောတိကျသောဘောလုံးဝက်အူများနှင့် ချိတ်ဆက်ထားပြီး၊ လိုက်လျောညီထွေရှိသော အစာကျွေးခြင်း၊ တိကျသောနေရာချထားခြင်းနှင့် မြင့်မားသောဂီယာတိကျမှုတို့ဖြင့် ချိတ်ဆက်ထားသည်။
Z-axis ဆာဗာမော်တာတွင် ဘရိတ်လုပ်ဆောင်ချက် ပါရှိသည်။ပါဝါချို့ယွင်းသောအခါတွင် မော်တာရိုးတံကို တင်းတင်းကြပ်ကြပ် ဆုပ်ကိုင်ထားရန် ဘရိတ်ကို အလိုအလျောက် ထိန်းထားနိုင်ပြီး ဘေးကင်းရေး အကာအကွယ်တွင် ပါ၀င်သော လှည့်ပတ်မှု မပြုနိုင်စေရန်။
3. လျှပ်စစ်ဗိုင်းလိပ်တံ
မော်တာအသုံးပြုထားသော ဗိုင်းလိပ်တံသည် ကိုယ်တိုင်တီထွင်ထားသည့် BT50 မော်တာအသုံးပြုထားသော ဗိုင်းလိပ်တံ (HSKA100 မော်တာအသုံးပြုထားသော ဗိုင်းလိပ်တံကို စိတ်ကြိုက်ရွေးချယ်နိုင်သည်) ကို လက်ခံရရှိပြီး အဆုံးတွင် ကိရိယာကို အေးစေရန်အတွက် လက်စွပ်စပန့်အဆစ်ကို တပ်ဆင်ထားသည်။၎င်းတွင် မြန်နှုန်းမြင့်၊ တိကျမှု၊ မြင့်မားသော တုံ့ပြန်မှုစသည်ဖြင့် အားသာချက်များရှိပြီး ခြေလှမ်းမဲ့အမြန်နှုန်း စည်းမျဉ်း၊ တိကျမှုမြင့်မားသော ကုဒ်နံပါတ်ထည့်သွင်းထားသော၊ လမ်းညွှန်ချက်အတိုင်း တိကျသောရပ်တန့်မှုနှင့် တင်းကျပ်စွာ နှိပ်ခြင်းကို ရရှိနိုင်သည်။

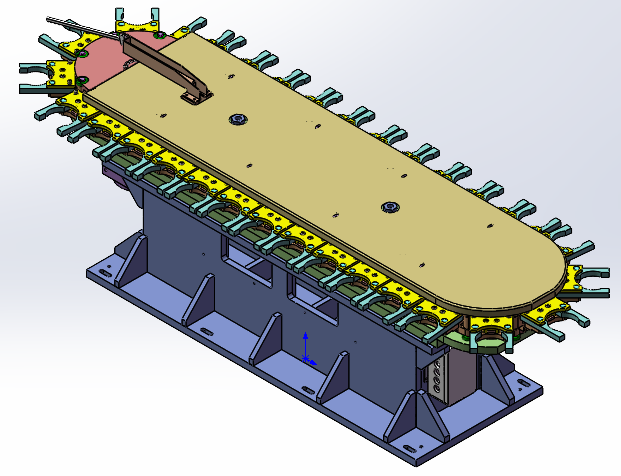
4. စားပွဲ
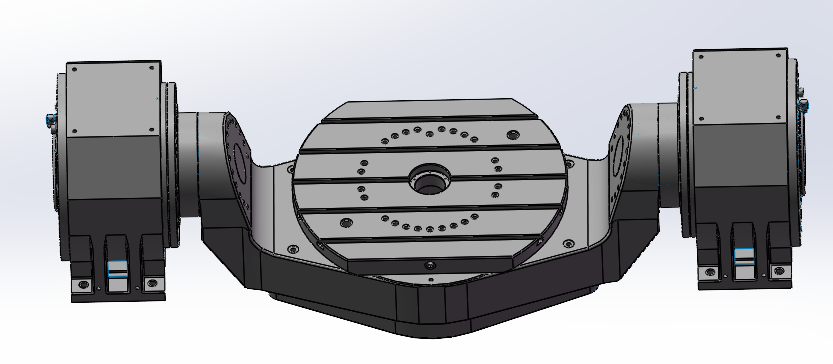
ကိုယ်တိုင်တီထွင်ထားသော dual-axis direct-drive cradle turntable တွင် တိကျမှုမြင့်မားသော absolute encoder တပ်ဆင်ထားပြီး အဆက်မပြတ်အပူချိန်တွင် ရေအေးစက်ဖြင့် အအေးခံထားသည်။မြင့်မားသော တောင့်တင်းမှု၊ တိကျမှု နှင့် မြင့်မားသော တက်ကြွသော တုံ့ပြန်မှု တို့၏ အားသာချက်များ ရှိသည်။worktable သည် 5-18mm radial T-slots များကိုလက်ခံရရှိပြီး ခွင့်ပြုနိုင်သောဝန်မှာ 2000kg (အညီအမျှခွဲဝေပေးသည်)
5. Tool မဂ္ဂဇင်း
ကိရိယာမဂ္ဂဇင်းသည် ကိရိယာ 30 ကို ထားရှိနိုင်သည့် BT50 အလျားလိုက် ကွင်းဆက် ဆာဗာတူးလ် မဂ္ဂဇင်းကို လက်ခံထားသည်။
6. အပြည့်အ၀ ပိတ်ထားသော ကွင်းဆက်တုံ့ပြန်မှုစနစ်
X, Y, Z လိုင်းနားပုဆိန်များကို HEIDENHAIN LC195S ပကတိတန်ဖိုးဆန်ခါပေတံဖြင့် တပ်ဆင်ထားပါသည်။A နှင့် C rotary tables များတွင် HEIDENHAIN RCN2310 absolute value angle encoders များ တပ်ဆင်ထားပြီး feed axes 5 ခု၏ အပိတ်တုံ့ပြန်မှု အပြည့်အစုံကို သိရှိနိုင်ရန်၊ စက်သည် တိကျပြီး မြင့်မားသော တိကျစွာ ထိန်းသိမ်းမှုရှိကြောင်း သေချာစေပါသည်။

7. အအေးခံခြင်းနှင့် pneumatic စနစ်
ကိရိယာများနှင့် workpieces များအတွက် လုံလောက်သော အအေးပေးနိုင်ရန် ကြီးမားသော flow cooling pump နှင့် water tank ကို တပ်ဆင်ထားပါသည်။headstock အဆုံးမျက်နှာတွင် M code သို့မဟုတ် control panel ဖြင့် ထိန်းချုပ်နိုင်သော cooling nozzles များ တပ်ဆင်ထားပါသည်။
လျှပ်စစ်ဗိုင်းလိပ်တံနှင့် direct drive turntable တို့သည် ကောင်းမွန်သောအခြေအနေတွင်ရှိပြီး အချိန်ကြာမြင့်စွာ ထိရောက်စွာလည်ပတ်နိုင်စေရန်အတွက် ရေအေးပေးစက်ကို တပ်ဆင်ထားသည်။
pneumatic စနစ်သည် စစ်ထုတ်ရန်အတွက် pneumatic အစိတ်အပိုင်းများကို လက်ခံပြီး ဗိုင်းလိပ်တံ၏ ပါးလွှာသောအပေါက်ကို သန့်ရှင်းရေးနှင့် မှုတ်ထုတ်ခြင်း၏ လုပ်ငန်းဆောင်တာများကို သိရှိနားလည်ကာ၊ spindle bearing ၏ လေဝင်ပေါက်ကို ကာကွယ်ကာ ဆန်ခါတံကိုမှုတ်ပြီး သန့်ရှင်းရေးလုပ်ခြင်း၏ လုပ်ဆောင်ချက်များကို သိရှိနားလည်ပါသည်။
8. Centralized ချောဆီစနစ်
လမ်းညွှန်ရထားလမ်း၏လျှောဘလောက်နှင့်ဘောလုံးဝက်အူ၏အခွံအားလုံးကိုအဆီပါးပါးဖြင့်ချောဆီပေးထားပြီးဘောလုံးဝက်အူနှင့်လမ်းညွှန်ရထား၏တိကျမှုနှင့်တည်ငြိမ်မှုသေချာစေရန်အတွက် ချောဆီများကိုပုံမှန်နှင့်ပမာဏအလိုက်ပေးပါသည်။
9. ရေနံနှင့်ဓာတ်ငွေ့ချောဆီစနစ်
လျှပ်စစ်ဗိုင်းလိပ်တံတွင် တင်သွင်းလာသော ဆီနှင့် သဘာဝဓာတ်ငွေ့ ချောဆီစက်ကို တပ်ဆင်ထားပြီး ဗိုင်းလိပ်တံကို ချောဆီအပြည့်နှင့် အေးစေနိုင်သည်။အာရုံခံကိရိယာသည် ပုံမှန်မဟုတ်သော ချောဆီသတိပေးချက်ကို ပေးစွမ်းနိုင်ပြီး ဗိုင်းလိပ်တံသည် အရှိန်အဟုန်မြင့်စွာ အချိန်ကြာမြင့်စွာ တည်ငြိမ်စွာ အလုပ်လုပ်နိုင်ကြောင်း ထိရောက်စွာသေချာစေနိုင်သည်။
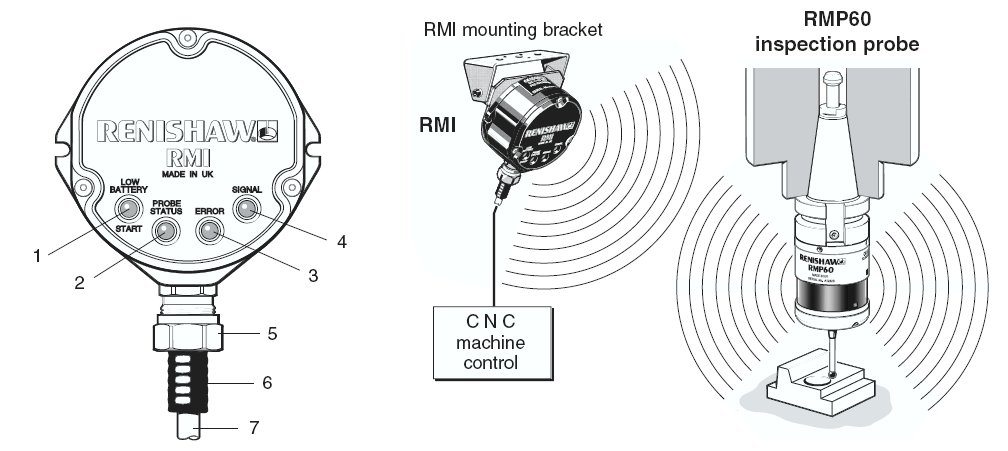
10. Workpiece တိုင်းတာခြင်းစနစ်
စက်တွင် Renishaw RMP60 ရေဒီယို probe တပ်ဆင်ထားပြီး RMI receiver နှင့် တွဲဖက်အသုံးပြုပြီး အလုပ်လုပ်သည့် ကြိမ်နှုန်းမှာ 2400 MHz မှ 2483.5 MHz၊ တိုင်းတာခြင်း တစ်လမ်းသွားပြန်လုပ်နိုင်စွမ်းသည် 1um ထက်နည်းသော သို့မဟုတ် ညီမျှသည် (480mm/min တိုင်းတာမှုအမြန်နှုန်းကို အသုံးပြုကာ၊ 50mm stylus) နှင့် အသုံးပြုနိုင်သော အလုပ်အပူချိန်မှာ 5°C မှ 55°C ဖြစ်သည်။

11. Tool တိုင်းတာခြင်းစနစ်
စက်တွင် Renishaw NC4 လေဆာကိရိယာတပ်ဆင်ထားပြီး၊ တိုင်းတာမှုပြန်လုပ်နိုင်စွမ်းမှာ ± 0.1um ဖြစ်ပြီး အလုပ်အပူချိန်မှာ 5°C မှ 50°C ဖြစ်သည်။
12. ဝင်ရိုးငါးခု တိကျစွာ ချိန်ညှိခြင်း လုပ်ဆောင်ချက်
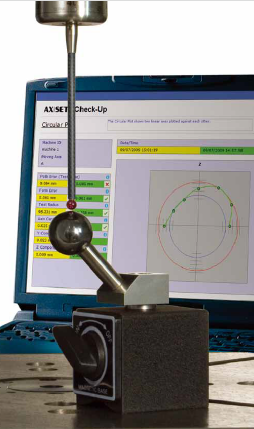
စက်တွင် Renishaw's AxiSet Check-Up Rotary Axis Line Checker kit တပ်ဆင်ထားပြီး၊ workpiece တိုင်းတာခြင်းစနစ် RMP60 နှင့် တွဲထားသောကြောင့် စက်အသုံးပြုသူများသည် rotary axes များ၏ အခြေအနေကို လျင်မြန်တိကျစွာ စစ်ဆေးနိုင်ပြီး အပူချိန်နှင့် စိုထိုင်းဆပြောင်းလဲမှုများ၊ စက်တိုက်မှု သို့မဟုတ် ပြဿနာများကို ဖော်ထုတ်နိုင်စေပါသည်။ ဝတ်ဆင်ခြင်းနှင့် မျက်ရည်။ပြဿနာများကို လျင်မြန်စွာ ချိန်ညှိနိုင်ပြီး စွမ်းဆောင်ရည် စစ်ဆေးမှုများ၊ စံညွှန်းများနှင့် အချိန်နှင့်အမျှ ရှုပ်ထွေးသော စက်များ ပြောင်းလဲပုံကို စောင့်ကြည့်နိုင်သည်။
13. စက်ကာကွယ်မှု
စက်သည် အအေးခံခြင်းနှင့် ချစ်ပ်များ အက်ကွဲခြင်းမှကာကွယ်ရန်၊ ဘေးကင်းသောလည်ပတ်မှုကိုသေချာစေရန်နှင့် သာယာသောအသွင်အပြင်ကိုရရှိစေရန် ဘေးကင်းရေးစံနှုန်းများနှင့်ကိုက်ညီသည့် အပြည့်အ၀အကာအကွယ်အဖုံးကို လက်ခံပါသည်။စက်၏ X-direction တွင် သံချပ်ကာအကာအကွယ်အဖုံးတစ်ခု တပ်ဆင်ထားပြီး လမ်းညွှန်ရထားလမ်းနှင့် ဘောလုံးဝက်အူတို့ကို ထိထိရောက်ရောက်ကာကွယ်ပေးနိုင်သည်။
14. စက်အလုပ်လုပ်အခြေအနေများ
(1) ပါဝါထောက်ပံ့မှု- 380V±10% 50HZ±1HZ သုံးဆင့်လျှပ်စီးကြောင်း
(2) ပတ်ဝန်းကျင်အပူချိန်: 5 ℃-40 ℃
(3) အကောင်းဆုံးအပူချိန်: 20 ℃ ± 2 ℃
(၄) နှိုင်းရစိုထိုင်းဆ- 20-75%
(5) လေအရင်းအမြစ်ဖိအား: 6 ± 1 ဘား
(6) လေအရင်းအမြစ်စီးဆင်းမှု 500 L/min
15. CNC စနစ်၏လုပ်ဆောင်ချက်မိတ်ဆက်
Siemens 840Dsl.730 CNC စနစ်ထည့်သွင်းမှု
| ကုသိုလ်ကံ
| နာမည်
| ပြီလေ။
|
| စနစ်လုပ်ဆောင်ချက်များ | အနိမ့်ဆုံး သွေးခုန်နှုန်းနှင့် ညီမျှသည်။ | Linear ဝင်ရိုး 0.001 မီလီမီတာ၊ rotary ဝင်ရိုး 0.001° |
| တစ်မိနစ်လျှင် အစာကျွေးနှုန်း/တော်လှန်ရေး | ||
| အစာကျွေးပြီး အမြန်ဖြတ်သန်းပါ။ | ||
| Feedrate သည် 0~120% ထပ်ရေးသည် | ||
| Spindle မြန်နှုန်းကန့်သတ်ချက် | ||
| Spindle အဆက်မပြတ်အမြန်နှုန်းဖြတ်တောက်ခြင်း။ | ||
| Spindle စောင့်ကြည့်ခြင်း။ | ||
| Spindle မှ ထပ်ရေးခြင်း 50 ~ 120% | ||
| Spindle မြန်နှုန်းပြသမှု | ||
| ဘောင် | သြဒိနိတ်စနစ်အသွင်ပြောင်းခြင်းနှင့် bevel machining ကိုသဘောပေါက်ပါ။ | |
| တိုက်ရိုက်/သွယ်ဝိုက် တိုင်းတာမှုစနစ် ပြောင်းခြင်း။ | ||
| ရှေ့ကိုမျှော်ကြည့်ခြင်း သို့မဟုတ် ရှေ့သို့မျှော်ကြည့်ခြင်းလုပ်ဆောင်ချက် | ||
| ခဲဝက်အူပေါက်အမှားလျော်ကြေး | ||
| တိုင်းတာမှုစနစ် Error Compensation | ||
| Quadrant Error လျော်ကြေးပေးခြင်း | ||
| တန်ပြန်လျော်ကြေး | ||
| ကိရိယာစီမံခန့်ခွဲမှု | ||
| Hardware Configuration | ထိန်းချုပ်ပုဆိန်အရေအတွက် | X၊ Y၊ Z၊ A၊ C တွင် သြဒိနိတ်ဝင်ရိုးငါးခုနှင့် ပင်မဝင်ရိုးတစ်ခု |
| ပုဆိန်အရေအတွက်ကို တပြိုင်နက် ထိန်းချုပ်သည်။ | X, Y, Z, A, C ဝင်ရိုးငါးခု ချိတ်ဆက်မှု | |
| ဝင်ရိုးအမည် | X၊ Y၊ Z၊ A၊ C၊ SP | |
| စောင့်ကြည့် | 15" ရောင်စုံ LCD မျက်နှာပြင်၊ တရုတ်/အင်္ဂလိပ်ဘာသာဖြင့် စာသားကို ပြသသည်။ | |
| လည်ပတ်မှုဘောင် | OP015 လုပ်ဆောင်ချက်အပြည့်အစုံ CNC ကီးဘုတ် | |
| လူ-စက်ဆက်သွယ်မှုကြားခံ | ပုံမှန်ဖွဲ့စည်းပုံ TCU | |
| စက်ထိန်းချုပ်မှုဘောင် | SINUMERIK MCP 483C PN ထိန်းချုပ်မှုဘောင်၊ LED ပါသော စက်ခလုတ် ၅၀၊ PROFINET၊ စက်မှုအီသာနက် မျက်နှာပြင်ပါရှိ | |
| လက်ကိုင်လည်ပတ်မှုယူနစ် | ||
| စံကီးဘုတ် အင်တာဖေ့စ် | ||
| အီသာနက် အင်တာဖေ့စ် | NCU (အလုပ်ရုံဆွေးနွေးပွဲ ကွန်ရက်ဖွင့်ခြင်းလုပ်ဆောင်ချက်) တွင် ပေါင်းစပ်ထားသည်။ | |
| USB အပေါက် | TCU တွင် 3 x 0.5 A USB ပေါင်းစပ်ထားသည်။ | |
| PLC ပရိုဂရမ် | PLC317-3PN/DP | |
| Interpolation လုပ်ဆောင်မှု | ခေတ္တရပ်ပါ။ | |
| ကြိုးဖြတ်ခြင်း။ | ||
| တပြိုင်နက်တည်းဖြတ်တောက်ခြင်း။ | ||
| Three-coordinate linear interpolation | ||
| ကာမဆန္ဒနှစ်ခု- ညှိနှိုင်းနေသော မြို့ပတ်ရထား ပေါင်းစည်းမှု | ||
| Helical interpolation | ||
| ပုတ်ခြင်း / တင်းကျပ်စွာပုတ်ခြင်း။ | ||
| ပရိုဂရမ်ရေးခြင်း။ | အလွန်အကျွံ ချုံ့/လှည့်ခြင်း။ | |
| ပရိုဂရမ်တည်းဖြတ်သူ | အဆင့်မြင့် ဘာသာစကား ပရိုဂရမ်းမင်းအင်္ဂါရပ်များဖြင့် DIN66025 စံနှုန်းကို လိုက်နာပါ။ | |
| အကြွင်းမဲ့ သို့မဟုတ် တိုးမြင့်သော ပရိုဂရမ်ရေးဆွဲခြင်း။ | ||
| အသုံးပြုသူ variable၊ settable | ||
| ပရိုဂရမ်က ခုန်ပြီး အကိုင်းအခက် | ||
| မက်ခရိုအစီအစဉ် | ||
| စနစ်ဘာသာပြန်ခြင်းနှင့် လည်ပတ်မှုကို ညှိနှိုင်းပါ။ | ||
| တပြိုင်နက်တည်း ပရိုဂရမ်ရေးဆွဲခြင်းနှင့် စက်ပိုင်းဆိုင်ရာ | ||
| ရည်ညွှန်းချက်သို့ ပြန်သွားရန် အစီအစဉ်ညွန်ကြားချက် | ||
| Contour programming နှင့် စည်သွတ်စက်ဝိုင်းပရိုဂရမ်ရေးဆွဲခြင်း။ | ||
| အလင်းပြန်ခြင်းနှင့် အတိုင်းအတာ | ||
| လေယာဉ်ရွေးချယ်မှု | ||
| Workpiece coordinate စနစ် | ||
| စည်သွတ်တူးဖော်ခြင်းနှင့်ကြိတ်စက်လည်ပတ် | ||
| သုညနှိမ် | ||
| ပိတ်ဆို့ရှာဖွေမှု | ||
| ပရိုဂရမ်နံပါတ်ရှာဖွေမှု | ||
| နောက်ခံတည်းဖြတ်ခြင်း။ | ||
| ပရိုဂရမ်ကာကွယ်မှု | ||
| လမ်းညွှန်ဖြင့် ပရိုဂရမ်ကို ရွေးပါ။ | ||
| ဂဏန်းသင်္ချာနှင့် trigonometric လုပ်ဆောင်ချက်များ | ||
| နှိုင်းယှဉ်ခြင်းနှင့် ယုတ္တိရှိသော လုပ်ဆောင်ချက်များ | ||
| Five-axis machining software package | ဝင်ရိုးငါးခု အသွင်ပြောင်းခြင်း၊ငါးဝင်ရိုးတူးလ်လျော်ကြေး၊ကိရိယာစင်တာ (RTCP) ပတ်လည်လှည့်ခြင်းလုပ်ဆောင်ချက် | |
| ဘေးကင်းရေးကာကွယ်မှု function ကို | ပရိုဂရမ်ထုတ်နိုင်သော စက်ကိရိယာဧရိယာ ကန့်သတ်ချက်များ | |
| ပရိုဂရမ်စမ်းသပ်လုပ်ဆောင်ချက် | ||
| အရေးပေါ်ရပ်ရန် | ||
| ဆော့ဖ်ဝဲကန့်သတ်စောင့်ကြည့်ရေး | ||
| Contour စောင့်ကြည့်ခြင်း။ | ||
| ကွန်တိုတိုက်မှု သိရှိခြင်း။ | ||
| ငြိမ်စောင့်ကြည့် | ||
| တည်နေရာစောင့်ကြည့် | ||
| မြန်နှုန်းစောင့်ကြည့် | ||
| ဆောင်ရွက်နေသည့် ဧရိယာကန့်သတ်ချက်များ | ||
| torque ကန့်သတ်ချက် | ||
| ဘေးကင်းရေး လုပ်ဆောင်ချက်များ နာရီ စောင့်ကြည့်တိုင်းတာခြင်း ဆားကစ်များ၊ အပူလွန်ကဲခြင်း၊ ဘက်ထရီ၊ ဗို့အား၊ မှတ်ဉာဏ်၊ ကန့်သတ်ခလုတ်များ၊ ပန်ကာ စောင့်ကြည့်ခြင်း | ||
| လည်ပတ်မှုနည်းလမ်း | အလိုအလျောက် | |
| JOG (လက်စွဲ) ညှိနှိုင်းမှု | ||
| Handwheel လည်ပတ်မှု | ||
| MDA လက်စွဲဒေတာထည့်သွင်းခြင်း။ | ||
| စာသားပြသမှု၊ စခရင်ချွေတာဖြင့် NC နှင့် PLC အဖြေရှာခြင်း။ | ||
| လည်ပတ်မှုနှင့်ပြသမှု | ကိုယ်တိုင်ရောဂါရှာဖွေရေးလုပ်ဆောင်ချက်ပြသခြင်း။ | REF မုဒ်၊ တိုးမြှင့်မုဒ် (x1၊ x10၊ x100) အပါအဝင် |
| လက်ရှိတည်နေရာပြသမှု | ||
| ဂရပ်ဖစ်ပြသမှု | ||
| ပရိုဂရမ်ပြသခြင်း။ | ||
| ပရိုဂရမ်အမှားအယွင်းပြသခြင်း။ | ||
| လည်ပတ်မှု အမှားအယွင်း ပြသခြင်း။ | ||
| အမှန်တကယ်ဖြတ်တောက်ခြင်းအမြန်နှုန်းပြသမှု | ||
| တရုတ်နှင့် အင်္ဂလိပ် မီနူးတို့ကို ပြသထားသည်။ | ||
| အချက်ပေးအချက်ပြမှု | ||
| M-code ညွှန်ကြားချက်အစုံအစုံ | ||
| PROFINET ဘတ်စ်ကားဒေတာလွှဲပြောင်းမှုကို ပံ့ပိုးပါ။ | ||
| ဒေတာဆက်သွယ်ရေး | USB အပေါက် | NC ဒေတာ၊ PLC ဒေတာနှင့် ပရိုဂရမ်များကို အဝင်နှင့် အထွက်ဒေတာအတွက် U disk တွင် အရန်သိမ်းထားသည်။ |
| Ethernet ဒေတာလွှဲပြောင်းခြင်း။ | Ethernet interface မှတဆင့် |
အဓိက ကန့်သတ်ချက်
| ကုသိုလ်ကံ | သတ်မှတ်ချက်များ | ယူနစ် | |||
| အလုပ်ခုံ
| အလုပ်စားပွဲအရွယ်အစား | φ1000×800 | mm | ||
| အများဆုံးဝန်ခွင့်ပြုသည်။ | ၂၀၀၀ | kg | |||
| T-slot အရွယ်အစား | ၅×၁၈ | 个×mm | |||
| လုပ်ဆောင်နေသည် အတိုင်းအတာ
| X ဝင်ရိုး | ၁၁၅၀ | mm | ||
| Y ဝင်ရိုး | ၁၃၀၀ | mm | |||
| Z ဝင်ရိုး | ၉၀၀ | mm | |||
| A-ဝင်ရိုး | -150~+130 | ° | |||
| C ဝင်ရိုး | ၃၆၀ | ° | |||
| ဗိုင်းလိပ်တံအဆုံးမှ အလုပ်စားပွဲဆီသို့ အကွာအဝေး | မက်တယ်။ | ၁၀၈၀ | mm | ||
| မင်း | ၁၈၀ | mm | |||
| ဗိုင်းလိပ်တံ
| Cone အပေါက် | BT50 | |||
| အဆင့်သတ်မှတ်ထားသော မြန်နှုန်း | ၁၅၀၀ | r/မိနစ် | |||
| အမြင့်ဆုံးမြန်နှုန်း | ၁၀၀၀၀ | ||||
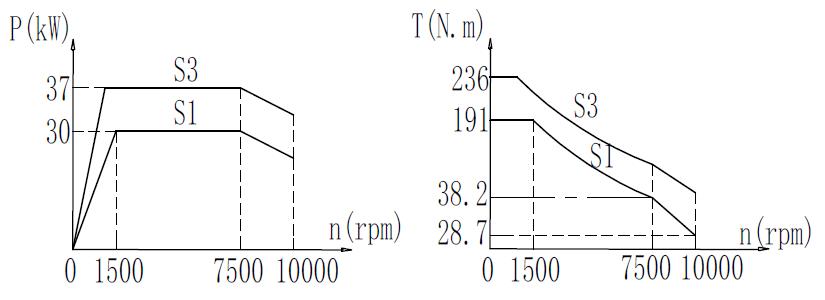
| အထွက် torque S1/S6 | ၁၉၁/၂၃၆ | ကမ္မဿကာ | |||
| Spindle motor ပါဝါ S1/S6 | ၃၀/၃၇ | kW | |||
| ဝင်ရိုး
| မြန်မြန်ရွှေ့ပါ။ | X ဝင်ရိုး | 25 | m/min | |
| Y ဝင်ရိုး | 25 | ||||
| Z ဝင်ရိုး | 25 | ||||
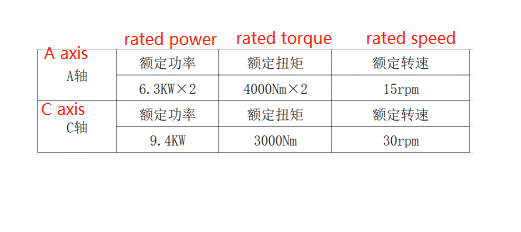
| Turntable အမြင့်ဆုံးမြန်နှုန်း | A-ဝင်ရိုး | 15 | rpm | ||
| C ဝင်ရိုး | 30 | rpm | |||
| X/Y/Z ဝင်ရိုးမော်တာ ပါဝါ | ၃.၁/၄.၄/၂ | kW | |||
| A/C ဝင်ရိုး မော်တာ ပါဝါ | 6.3 *2/ 9.4 | kW | |||
| A-ဝင်ရိုး | အဆင့်သတ်မှတ်ထားသော ရုန်းအား | 4000×2 | ကမ္မဿကာ | ||
| C ဝင်ရိုး | အဆင့်သတ်မှတ်ထားသော ရုန်းအား | ၃၀၀၀ | ကမ္မဿကာ | ||
| အများဆုံးအစာကျွေးနှုန်း | X/Y/Z | 25 | m/min | ||
| A/C | ၁၅/၃၀ | rpm | |||
| Tool မဂ္ဂဇင်း
| Tool မဂ္ဂဇင်းပုံစံ | အလျားလိုက် | |||
| ကိရိယာရွေးချယ်ရေးနည်းလမ်း | အနီးဆုံး ကိရိယာ ရွေးချယ်မှု နှစ်လမ်း | ||||
| Tool မဂ္ဂဇင်းစွမ်းရည် | 30 | T | |||
| အများဆုံးကိရိယာအရှည် | ၄၀၀ | mm | |||
| အများဆုံးကိရိယာအလေးချိန် | 20 | kg | |||
| အများဆုံးဖြတ်စက်ခေါင်းအချင်း | ဓားတွေနဲ့ ပြည့်နေတယ်။ | φ125 | mm | ||
| ကပ်လျက်ဗလာတူးလ် | φ180 | mm | |||
| ရာထူး တိကျမှု | အမှုဆောင်စံ | GB/T20957.4 (ISO10791-4) | |||
| X-axis/Y-axis/Z-axis | ၀.၀၀၈/၀.၀၀၈/၀.၀၀၈ | mm | |||
| B ဝင်ရိုး / C ဝင်ရိုး | 8"/8" | ||||
| ထပ်လုပ်ပါ။ ရာထူး တိကျမှု | X-axis/Y-axis/Z-axis | 0.006/0.006/0.006 | mm | ||
| B ဝင်ရိုး / C ဝင်ရိုး | 6"/6" | ||||
| စက်အလေးချိန် | ၃၃၀၀၀ | kg | |||
| စုစုပေါင်းလျှပ်စစ်စွမ်းရည် | 80 | KVA | |||
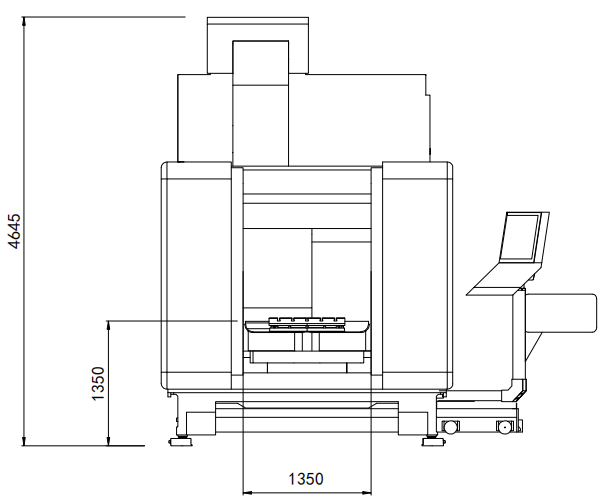
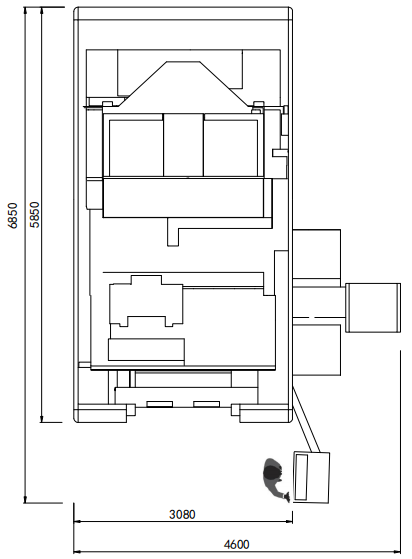
| စက်ကောက်ကြောင်းအရွယ်အစား | 7420×4770×4800 | mm | |||
ဖွဲ့စည်းမှုစာရင်း
စံ
|
| 1. အဓိက အစိတ်အပိုင်းများ (အခြေခံ၊ ကော်လံ၊ အလင်းတန်း၊ လျှောပြား၊ ဗိုင်းလိပ်တံ ဘောက်စ် အပါအဝင်) |
| 2. ဝင်ရိုးသုံးပေါက် X၊ Y၊ Z ကျွေးသည့်စနစ် | |
| 3. Cradle အမျိုးအစား turntable AC1000 | |
| 4. လျှပ်စစ်ဗိုင်းလိပ်တံ | |
| 5. လျှပ်စစ်ထိန်းချုပ်မှုစနစ် (လျှပ်စစ်ကက်ဘိနက်၊ ပါဝါမော်ဂျူး၊ ဆာဗာမော်ဂျူး၊ PLC၊ လည်ပတ်မှုဘောင်၊ မျက်နှာပြင်ပြသမှု၊ လက်ကိုင်ယူနစ်၊ လျှပ်စစ်ဗီဒိုလေအေးပေးစက် စသည်ဖြင့်) | |
| 6. ဟိုက်ဒရောလစ်စနစ် | |
| 7. Pneumatic စနစ် | |
| 8. Centralized ချောဆီစနစ် | |
| 9. ရေအေးစက် | |
| 10. Chip conveyor, water tank, chip collector | |
| 11. ဆန်ခါပေတံ | |
| 12. ရထားလမ်းကာကွယ်ရေးအဖုံး | |
| 13. စက်ခြုံပြီးအကာအကွယ်အဖုံး | |
| 14. Workpiece တိုင်းတာခြင်းစနစ် | |
| 15. Tool setting တူရိယာ | |
| 16. ဝင်ရိုးငါးခု တိကျစွာ ချိန်ညှိခြင်း လုပ်ဆောင်ချက် | |
|
| 1. ညီညွတ်မှုလက်မှတ် ၁ 2. ထုပ်ပိုးမှုစာရင်း 1 မိတ္တူ ၃။ စက်လက်စွဲ ၁ စုံ (အီလက်ထရွန်းနစ်ဗားရှင်း) 4. စက်အရန်ဒေတာ 1 set (U disk) 5.840D အချက်ပြရောဂါရှာဖွေခြင်းလက်စွဲ 1 set (အီလက်ထရွန်းနစ်ဗားရှင်း)/828D ရောဂါရှာဖွေရေးလမ်းညွှန် 1 မိတ္တူ (အီလက်ထရွန်းနစ်ဗားရှင်း) 6.840D ကြိတ်ခွဲခြင်းလုပ်ငန်းလက်စွဲ 1 မိတ္တူ (အီလက်ထရွန်းနစ်ဗားရှင်း) / 828D လုပ်ဆောင်ချက်လက်စွဲ 1 မိတ္တူ (အီလက်ထရွန်းနစ်ဗားရှင်း) 840D ပရိုဂရမ်းမင်းလက်စွဲ 1 အခြေခံအပိုင်း (အီလက်ထရွန်းနစ်ဗားရှင်း) / 828D ပရိုဂရမ်းမင်းလက်စွဲ 1 (အီလက်ထရွန်းနစ်ဗားရှင်း) |
| ကုသိုလ်ကံ | အမှတ်တံဆိပ်များ |
| X/Y/Z ဝင်ရိုးမော်တာနှင့် မောင်းနှင်ပါ။ | Siemens၊ ဂျာမနီ |
| စွမ်းအင်ကွင်းဆက် | ဂျာမနီ igus |
| screw bearing | ဂျပန် NSK/NACHI |
| Linear လမ်းညွှန်များ | Schneeberg၊ ဂျာမနီ |
| Tool မဂ္ဂဇင်း | Okada |
| လျှော့ချပေးသည်။ | STOBER၊ ဂျာမနီ |
| Centralized ချောဆီ | ဂျပန် |
| ဘောလုံးဝက်အူ | SHUTON၊ စပိန် |
| Pneumatic အစိတ်အပိုင်းများ | ဂျပန် SMC |
| လျှပ်စစ်မီးပုံးလေအေးပေးစက် | တရုတ် |
| ရေအေးစက် | တရုတ် |
| ဆန်ခါပေတံ | HEIDENHAIN၊ ဂျာမနီ |
| Workpiece တိုင်းတာခြင်းစနစ် | Renishaw၊ ယူကေ |
| ကိရိယာတိုင်းတာရေးစနစ် | Renishaw၊ ယူကေ |
| စက်ဖြင့် ဖောက်သည် | သတ်မှတ်ချက်များ | အရေအတွက် |
| စက်မွေ့ရာသံ |
| 8 အစုံ |
| ကျောက်ဆူးများ |
| 8 အစုံ |
| ကွင်း | M30 | ၂ကျပ် |
| ကွင်း | M36 | ၂ကျပ် |
| supenders |
| 1 set |
| အယ်လန်သော့ | 10 | 1 |
| အယ်လန်သော့ | 12 | 1 |
| အယ်လန်သော့ | 14 | 1 |
| အယ်လန်သော့ | 19 | 1 |
| Z ဝင်ရိုး mount |
| 1 |
| X-axis mount |
| 1 |
| Y-ဝင်ရိုးပြုပြင်ခြင်း။ |
| 1 |
သင့်အာရုံစိုက်မှုအတွက် ကျေးဇူးတင်ပါသည်။