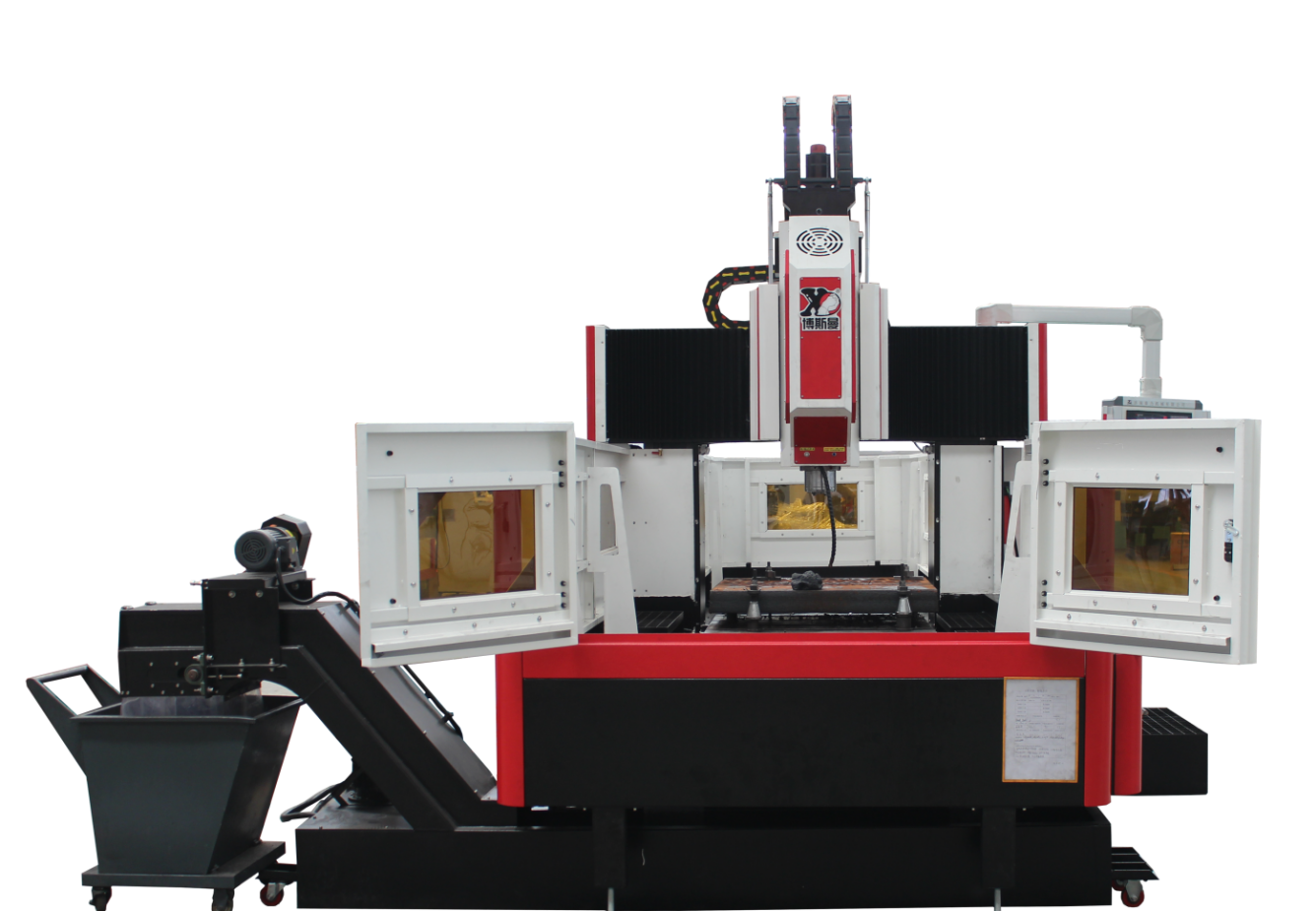
ပုံသေ Beam CNC တူးဖော်ခြင်းနှင့် ကြိတ်စက်


CNC တူးဖော်ခြင်းနှင့် ကြိတ်စက်
စက်၏လုပ်ဆောင်ချက်နှင့် အင်္ဂါရပ်ဖော်ပြချက်
1) CNC gantry တူးဖော်ခြင်းနှင့် ကြိတ်စက်သည် စက်ယန္တရားများ၊ လျှပ်စစ်နှင့် ဟိုက်ဒရောလစ်စသည့် အဆင့်မြင့်နည်းပညာများကို ပေါင်းစပ်ထားသည့် စက်ကိရိယာတစ်ခုဖြစ်သည်။ မှိုများ၊ အနားကွပ်များ၊ အဆို့ရှင်များ၊ တည်ဆောက်ပုံဆိုင်ရာ အစိတ်အပိုင်းများ စသည်တို့ကို လုပ်ဆောင်ရန်အတွက် အဓိကအားဖြင့် အသုံးပြုသည်။ အမျိုးမျိုးသော ပြားများ၊ သေတ္တာများ၊ ဖရိန်များ၊ မှိုစသည်တို့ကဲ့သို့သော ရှုပ်ထွေးသော အစိတ်အပိုင်းများကို ကြမ်းကြမ်းတမ်းတမ်းနှင့် အပြီးသတ်ရာတွင် တွင်ကျယ်စွာ အသုံးပြုကြသည်။ ဤစက်ကိရိယာသည် ဒေါင်လိုက်ကြိတ်ခြင်းခေါင်း၏ အလျားလိုက် (Y-ဝင်ရိုး) နှင့် ဒေါင်လိုက်ရွေ့လျားမှု (Z-axis) နှင့် ဇယား၏ ဝင်ရိုး (X axis) ချိတ်ဆက်မှု (X axis) ကို သိရှိနိုင်သည်။ ကြိတ်ခွဲခြင်း၊ ငြီးငွေ့လာခြင်း၊ တူးဖော်ခြင်း၊ တင်းကျပ်စွာ ပုတ်ခြင်း၊ ကောက်နှုတ်ခြင်းနှင့် တန်ပြန်ချခြင်းစသည့် လုပ်ငန်းစဉ်ပေါင်းစုံကို လုပ်ဆောင်နိုင်သည်။ စက်တစ်ခုလုံးသည် ကြံ့ခိုင်မှုမြင့်မားပြီး တိကျကောင်းမွန်သော ထိန်းသိမ်းမှုဖြင့် gantry frame တည်ဆောက်မှုကို လက်ခံပါသည်။ ၎င်းသည် သုံးစွဲသူများအတွက် ပထမဆုံးရွေးချယ်မှုဖြစ်သည်။
2) စက်၏ အလုံးစုံ အပြင်အဆင်
(1) ပုံသေ beam အမျိုးအစား gantry frame တည်ဆောက်ပုံကို လက်ခံထားပြီး၊ ကုတင်ကို ပုံသေထားပြီး၊ နှစ်ထပ်ကော်လံနှင့် ခုတင်ကို bolts များဖြင့် ချိတ်ဆက်ထားသည်။ အလုပ်စားပွဲသည် ကုတင်ပေါ်ရှိ X ဝင်ရိုးတွင် ရွေ့လျားပြီး၊ ခေါင်းစွပ်သည် ကုန်းနှီးပေါ်ရှိ Z လမ်းကြောင်းအတိုင်း ရွေ့လျားကာ၊ ကုန်းနှီးနှင့် ခေါင်းစွပ်သည် အလင်းတန်းပေါ်ရှိ Y ဦးတည်ရာသို့ ရွေ့လျားသည်။
(၂) စက်ကိရိယာ၏ အဓိက အစိတ်အပိုင်းကြီးများ- အိပ်ရာ၊ ကော်လံ၊ အလင်းတန်း၊ ကုန်းနှီးနှင့် ခေါင်းစွပ်များအားလုံးသည် ခိုင်ခံ့မြင့်မားသော သံထည်ပစ္စည်းများဖြစ်သည်။ ဤကြီးမားသောအစိတ်အပိုင်းများကို 3D ကွန်ပြူတာဆော့ဖ်ဝဲဖြင့် ပိုမိုကောင်းမွန်အောင်ပြုလုပ်ထားပြီး ကျန်ရှိသောစိတ်ဖိစီးမှုကိုဖယ်ရှားရန်အတွက် နံရိုးပုံစံနှင့် ပြီးပြည့်စုံသောအပူကုသမှုလုပ်ငန်းစဉ်များပါရှိသည်။ စက်တစ်ခုလုံးတွင် လုံလောက်သော ခွန်အား၊ တောင့်တင်းမှုနှင့် တည်ငြိမ်မှု ရှိစေရန်၊ တုန်ခါမှုကို ဖြတ်တောက်ခြင်း ခံနိုင်ရည်ရှိစေရန်။
3) အိပ်ယာ-အလုပ်ခုံ
(1) အိပ်ရာကို ကွန်ပြူတာသုံးဖက်မြင်အကူအညီဖြင့် ပိုမိုကောင်းမွန်အောင်ပြုလုပ်ထားသည့် ဒီဇိုင်းကို အသုံးပြု၍ ခိုင်ခံ့မြင့် HT250 သံထည်ပစ္စည်းဖြင့် ပြုလုပ်ထားပြီး၊ နံရိုးများကို ကျိုးကြောင်းဆီလျော်စွာ စီစဉ်ပေးထားပြီး ၎င်း၏ တောင့်တင်းမှုနှင့် ကြံ့ခိုင်မှုကို မြှင့်တင်ထားသည်။
(2) X-axis guideway pair သည် တင်သွင်းလာသော heavy-duty linear guides များဖြစ်သော low dynamic and static friction coefficient, high table sensitivity, low-speed vibration, low-speed no crawling, high positioning accuracy, and excellent servo drive performance. : တစ်ချိန်တည်းမှာပင်၊ ဝန်ပမာဏသည်ကြီးမားပြီးဖြတ်တောက်ခြင်းတုန်ခါမှုကိုခံနိုင်ရည်ကောင်းမွန်သည်။ .
(၃) X-axis drive- ဆာဗာမော်တာအား လျှော့ကိရိယာမှတဆင့် ball screw နှင့် ချိတ်ဆက်ထားပြီး၊ X-axis feed လှုပ်ရှားမှုကို သိရှိနိုင်စေရန် ကုတင်ပေါ်တွင် အသွားအပြန် ရွေ့လျားစေပြီး ဝက်အူအား ပိုမိုကောင်းမွန်စေရန် ဝက်အူကို အကြိုဆန့်ပေးပါသည်။ တောင့်တင်းခြင်း။
4) အလင်းတန်း
(1) အလျားလိုက်နှင့် ကော်လံကို ခိုင်ခံ့မြင့် HT250 သွန်းသံပစ္စည်းကို အသုံးပြု၍ gantry frame တည်ဆောက်ပုံတွင် ပေါင်းစပ်ထားပြီး၊ နံရိုးများကို ကျိုးကြောင်းဆီလျော်စွာ စီစဉ်ပေးထားပြီး လုံလောက်သော ကွေးညွှတ်မှုနှင့် တင်းမာမှုရှိသည်။
(၂) beam guide pair သည် heavy linear guide ကို လက်ခံသည်။
(3) Y-axis drive- servo motor သည် coupling မှတဆင့် ball screw နှင့် တိုက်ရိုက်ချိတ်ဆက်ထားပြီး၊ ball screw သည် Y-axis feed လှုပ်ရှားမှုကို သိရှိနိုင်ရန် အလင်းတန်းပေါ်တွင် ဘယ်ညာရွှေ့ရန် ကုန်းနှီးကို မောင်းနှင်ပေးပါသည်။
5) ခေါင်းစွပ်
(1) Headstock သည် ရွေ့လျားမှု မြင့်မားသော တင်းကျပ်မှု၊ မြင့်မားသော နေရာချထားမှု တိကျမှုနှင့် မြန်နှုန်းနိမ့်တည်ငြိမ်မှုတို့ ရှိသည့် လေးလံသော ရိုလာလိုင်းယာလမ်းညွှန်ကို လက်ခံပါသည်။
(2) Z-axis drive- servo motor သည် coupling မှတဆင့် ball screw နှင့် တိုက်ရိုက်ချိတ်ဆက်ထားပြီး၊ ball screw သည် Z-axis feed ကိုသိရှိနိုင်ရန် ကုန်းနှီးပေါ်တွင် အတက်အဆင်းရွေ့လျားရန် headstock ကို မောင်းနှင်ပါသည်။ Z-axis မော်တာတွင် အလိုအလျောက် ဘရိတ်လုပ်ဆောင်ချက် ပါရှိသည်။ ပါဝါချို့ယွင်းသောအခါတွင်၊ လည်ပတ်ခြင်းမှကာကွယ်ရန် မော်တာရိုးတံကို တင်းတင်းကြပ်ကြပ်ဆုပ်ကိုင်ထားသည်။
(3) spindle အုပ်စုသည် တိကျပြီး မြင့်မားသော စွမ်းဆောင်ရည်ဖြင့် ထိုင်ဝမ် Jianchun မြန်နှုန်းမြင့် အတွင်းပိုင်း အအေးခံ ဗိုင်းလိပ်တံကို လက်ခံပါသည်။ ပင်မရိုးတံသည် ပင်မရိုးရိုးပေါ်ရှိ လိပ်ပြာစပရိန်ဖြင့် ဓားကို အပိုင်းလေးပိုင်း broach ယန္တရားမှတစ်ဆင့် ကိရိယာလက်ကိုင်၏ ဆွဲသံလက်သည်းပေါ်တွင် တင်းမာမှုအားသက်ရောက်သဖြင့် ဓားကို ဆုပ်ကိုင်ထားပြီး ဖြည်သည့်ကိရိယာသည် pneumatic နည်းလမ်းကို လက်ခံသည်။
6) Pneumatic စနစ်
spindle ၏ tool ကိုဖြေလျော့ရန်အသုံးပြုသည်။
7) စက်ကာကွယ်မှု
အိပ်ရာရထားလမ်း (X ဝင်ရိုး) သည် သံမဏိဖြင့် တယ်လီစကုပ်အကာအကွယ်အဖုံးကို အသုံးပြုသည်။
အလင်းလမ်းညွှန် (Y ဝင်ရိုး) သည် ပြောင်းလွယ်ပြင်လွယ်ရှိသော ကိုယ်တွင်းအင်္ဂါများကို အကာအကွယ်ပေးသည်။
8) ချောဆီ
(1) X, Y, Z သုံးဝင်ရိုးဝက်ဝံများအားလုံးကို အဆီပြန်ထားသည်။
(၂) X၊ Y၊ Z ဝင်ရိုးသုံးလမ်းကြောင်းအားလုံးကို ဆီဖြင့် ချောဆီပေးသည်။
(၃) X၊ Y၊ Z ဝင်ရိုးသုံးပေါက်ဝက်အူအတွဲများအားလုံးကို ဆီဖြင့် ချောဆီထည့်သည်။
9) CNC စနစ်
CNC စနစ်သည် စံချိန်စံညွှန်းမီသော Beijing Kaiendi ထိန်းချုပ်မှုစနစ်နှင့် မောင်းနှင်မှုဖြင့် တပ်ဆင်ထားပြီး လုပ်ဆောင်ချက်များ ပြီးပြည့်စုံပြီး လွယ်ကူသော လုပ်ဆောင်ချက်၊ ပုံမှန် RS-232 ဆက်သွယ်ရေး အင်တာဖေ့စ်၊ USB ပေါက်နှင့် ဆက်စပ်ဆော့ဖ်ဝဲ။
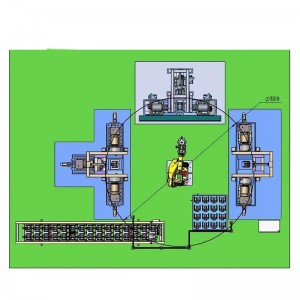
စစ်ထုတ်ခြင်းစနစ်
ဤစက်ကိရိယာသည် coolant အတွင်းရှိ အညစ်အကြေးများကို ထိရောက်စွာ စစ်ထုတ်ပေးနိုင်သည့် ဗဟိုရေစစ်ထုတ်စနစ် တပ်ဆင်ထားသည်။ အတွင်းပိုင်းရေဖြန်းစနစ်သည် လုပ်ဆောင်နေစဉ်အတွင်း သံတံများကို ကိရိယာပေါ်တွင် တွယ်ကပ်ခြင်းမှ တားဆီးနိုင်ပြီး၊ ကိရိယာဝတ်ဆင်မှုကို လျှော့ချနိုင်သည်၊ ကိရိယာ၏သက်တမ်းကို သက်တမ်းတိုးစေကာ၊ လုပ်ငန်းခွင်မျက်နှာပြင်ကို မြှင့်တင်ပေးနိုင်သည်။ ဖိအားမြင့်ရေထွက်ပေါက် pin သည် tool tip သည် workpiece ၏မျက်နှာပြင်ကိုကောင်းစွာကာကွယ်နိုင်ပြီး၊ မြန်နှုန်းမြင့် rotary အဆစ်ကိုကာကွယ်နိုင်သည်၊ rotary joint ကိုပိတ်ဆို့ခြင်းမှအညစ်အကြေးများကိုကာကွယ်ပေးပြီး workpiece ၏အလုံးစုံအရည်အသွေးကိုတိုးတက်စေပြီးအလုပ်ထိရောက်မှုကိုတိုးတက်စေသည်။ (မှတ်ချက် ရုပ်ပုံသည် စစ်ထုတ်စနစ်၏ ရုပ်ပုံဖြစ်သည်။)

သတ်မှတ်ချက်
| မော်ဒယ် | BOSM-DPH2016 | BOSM-DPH2022 | BOSM-DPH2625 | BOSM-DPH4026 | |
| အလုပ်အရွယ်အစား(mm) | 2000*1600 | 2000*2000 | 2500*2000 | 4000*2200 | |
| အများဆုံး loading(Kg) | ၇၀၀၀ | ၇၀၀၀ | ၇၀၀၀ | ၇၀၀၀ | |
| T အပေါက်(mm) | ၈*၂၂ | ၈*၂၂ | ၈*၂၂ | ၈*၂၂ | |
| ဇယား-X ဝင်ရိုး(mm) ၏ အများဆုံး ခရီး | ၂၂၀၀ | ၂၂၀၀ | ၂၆၀၀ | ၄၀၀၀ | |
| ဇယား-Y ဝင်ရိုး(mm) ၏ အများဆုံး ခရီး | ၁၆၀၀ | ၂၂၀၀ | ၂၅၀၀ | ၂၆၀၀ | |
| Spindle အများဆုံးလေဖြတ်-Z ဝင်ရိုး(mm) | ၆၀၀ | ၆၀၀ | ၆၀၀ | ၆၀၀/၁၀၀၀ | |
| spindle end မှ worktable သို့ (mm) အကွာအဝေး | အများဆုံး | ၈၀၀ | ၈၀၀ | ၈၀၀ | ၈၀၀ |
| အနိမ့်ဆုံး | ၂၀၀ | ၂၀၀ | ၂၀၀ | ၂၀၀ | |
| ပုတ်ပါ (၇:၂၄) | BT50 | BT50 | BT50 | BT50 | |
| Spindle အမြန်နှုန်း(r/min) | 30~3000/60~6000 | 30~3000/60~6000 | 30~3000/60~6000 | 30~3000/60~6000 | |
| Spindle motor ပါဝါ (Kw) | 22 | 22 | 22 | 22 | |
| မက်တယ်။ U-drill(mm) | φ90 | φ90 | φ90 | φ90 | |
| အများဆုံးထိခြင်း(mm) | M36 | M36 | M36 | M36 | |
| ဖြတ်တောက်ခြင်း feed speed range | ၁~၄၀၀၀ | ၁~၄၀၀၀ | ၁~၄၀၀၀ | ၁~၄၀၀၀ | |
| လျင်မြန်သောလှုပ်ရှားမှု(m/min) | ၂၀၀၈/၈/၈ | ၂၀၀၈/၈/၈ | ၂၀၀၈/၈/၈ | ၂၀၀၈/၈/၈ | |
| အမျိုးသားစံနှုန်း GB/T18400.4(m/min) အကောင်အထည်ဖော်ခြင်း | ±0.01/1000mm | ±0.01/1000mm | ±0.01/1000mm | ±0.01/1000mm | |
| အလေးချိန်(T) | ၁၆.၅ | 21 | 24 | 40 | |
အရည်အသွေးစစ်ဆေးခြင်း။
Bosman ၏ စက်တစ်ခုစီကို United Kingdom RENISHAW ကုမ္ပဏီမှ လေဆာ interferometer ဖြင့် ချိန်ညှိထားပြီး pitch error ၊ backlash ၊ positioning accuracy နှင့် ထပ်ခါတလဲလဲ positioning တိကျမှုကို သေချာစေရန် စက်၏ dynamic ၊ static stability နှင့် processing accuracy အတွက် တိကျစွာစစ်ဆေးပြီး ပေးလျော်ပါသည်။ . Ball bar စမ်းသပ်စက်တစ်ခုစီသည် စက်ဝိုင်းပုံတိကျမှုနှင့် စက်ဂျီဩမေတြီတိကျမှုကို ပြုပြင်ရန်နှင့် စက်၏ 3D စက်တိကျမှုနှင့် စက်ဝိုင်းတိကျမှုကို သေချာစေရန် စက်ဝိုင်းပုံဖြတ်ခြင်းစမ်းသပ်မှုများကို လုပ်ဆောင်ရန် RENISHAW ကုမ္ပဏီမှ ဘော်လုံးဘားစမ်းသပ်ကိရိယာကို အသုံးပြုပါသည်။

စက်ကိရိယာအသုံးပြုမှုပတ်ဝန်းကျင်
1.1 စက်ကိရိယာ ပတ်ဝန်းကျင် လိုအပ်ချက်
ပတ်ဝန်းကျင် အပူချိန်ကို အဆက်မပြတ် ထိန်းသိမ်းခြင်းသည် တိကျစွာ စက်ပစ္စည်းအတွက် မရှိမဖြစ် အရေးကြီးသော အချက်ဖြစ်သည်။
(1) ရရှိနိုင်သောပတ်ဝန်းကျင်အပူချိန်မှာ -10 ဖြစ်သည်။℃~35 ℃. ပတ်ဝန်းကျင် အပူချိန် 20 ရှိသောအခါ℃စိုထိုင်းဆ 40 ဖြစ်သင့်သည်။~75%။
(၂) သတ်မှတ်ထားသော အကွာအဝေးအတွင်း စက်ကိရိယာ၏ တည်ငြိမ်တိကျမှုကို ထိန်းသိမ်းရန်အတွက် အကောင်းဆုံးပတ်ဝန်းကျင်အပူချိန်သည် 15 ဖြစ်ရန် လိုအပ်ပါသည်။° C မှ 25° C နှင့် အပူချိန်ကွာခြားချက်
မကျော်လွန်သင့်ပါ။± 2 ℃/ 24 နာရီ။
1.2 ပါဝါထောက်ပံ့မှုဗို့အား- 3-phase, 380V, အတွင်းဗို့အားအတက်အကျ± 10%, ပါဝါထောက်ပံ့မှုအကြိမ်ရေ: 50HZ ။
1.3 အသုံးပြုမှုဧရိယာရှိ ဗို့အားမတည်ငြိမ်ပါက၊ စက်ကိရိယာ၏ပုံမှန်လည်ပတ်မှုကိုသေချာစေရန်အတွက် စက်ကိရိယာအား ထိန်းညှိပါဝါထောက်ပံ့မှုတစ်ခု တပ်ဆင်ထားသင့်သည်။
၁.၄။ စက်ကိရိယာတွင် ယုံကြည်စိတ်ချရသော မြေပြင်ရှိသင့်သည်- မြေစိုက်ဝါယာကြိုးသည် ကြေးနီဝါယာကြိုးဖြစ်ပြီး ဝါယာအချင်း 10 မီလီမီတာထက် မနည်းသင့်ပါ။²နှင့် grounding resistance သည် 4 ohms ထက်နည်းသည်။
1.5 စက်ပစ္စည်းများ၏ ပုံမှန်လုပ်ငန်းဆောင်တာများကို သေချာစေရန်အတွက်၊ လေအရင်းအမြစ်၏ ဖိသိပ်ထားသောလေသည် လေအရင်းအမြစ်၏လိုအပ်ချက်များနှင့် မကိုက်ညီပါက၊ လေအရင်းအမြစ်သန့်စင်သည့်ကိရိယာအစုံ (dehumidification၊ degreasing၊ filtering) ကို မပြုလုပ်မီ ထည့်သွင်းသင့်သည်။ စက်၏လေဝင်ပေါက်။
၁.၆။ စက်ပစ္စည်းများကို တိုက်ရိုက်နေရောင်ခြည်၊ တုန်ခါမှုနှင့် အပူရှိန်အရင်းအမြစ်များနှင့် ဝေးဝေးတွင် ထားသင့်ပြီး ကြိမ်နှုန်းမြင့်သည့် ဂျင်နရေတာများ၊ လျှပ်စစ်ဂဟေဆော်စက်များ စသည်တို့နှင့် ဝေးဝေးတွင် ထားသင့်သည်၊ သို့မှသာ စက်ထုတ်လုပ်မှု ချို့ယွင်းမှု သို့မဟုတ် စက်တိကျမှု ဆုံးရှုံးမှုကို ရှောင်ရှားသင့်သည်။
ဝန်ဆောင်မှုမတိုင်မီနှင့်အပြီး
1) လုပ်ငန်းမစမီ
ဖောက်သည်များထံမှ တောင်းဆိုချက်နှင့် လိုအပ်သော အချက်အလက်များကို လေ့လာပြီးနောက် ကျွန်ုပ်တို့၏ အင်ဂျင်နီယာများထံ တုံ့ပြန်ချက်မှတစ်ဆင့်၊ Bossman Technical team သည် သုံးစွဲသူများနှင့် နည်းပညာပိုင်းဆိုင်ရာ ဆက်သွယ်မှုနှင့် ဖြေရှင်းချက်ပုံစံများကို ပုံဖော်ပေးကာ သင့်လျော်သော machining solution နှင့် သင့်လျော်သော စက်များကို ရွေးချယ်ရာတွင် ဖောက်သည်အား ကူညီဆောင်ရွက်ပေးပါသည်။
2) ဝန်ဆောင်မှုအပြီး
A. တစ်နှစ်အာမခံဖြင့် စက်ကို တစ်သက်တာ ပြုပြင်ထိန်းသိမ်းမှုအတွက် ပေးဆောင်ရသည်။
B. စက်သို့ဦးတည်ရာဆိပ်ကမ်းသို့ရောက်ရှိပြီးနောက်တစ်နှစ်အာမခံကာလအတွင်း BOSSMAN သည် စက်ရှိလူလုပ်မဟုတ်သောချို့ယွင်းချက်အမျိုးမျိုးအတွက် အခမဲ့နှင့် အချိန်နှင့်တစ်ပြေးညီ ပြုပြင်ထိန်းသိမ်းမှုဝန်ဆောင်မှုများကို ဆောင်ရွက်ပေးမည်ဖြစ်ပြီး လူလုပ်မဟုတ်သောပျက်စီးမှုအစိတ်အပိုင်းများကို အချိန်နှင့်တစ်ပြေးညီ အစားထိုးလဲလှယ်ပေးမည်ဖြစ်ပါသည်။ အခကြေးငွေ အာမခံကာလအတွင်း ပျက်ကွက်မှုများ ဖြစ်ပေါ်ပါက သင့်လျော်သော အခကြေးငွေဖြင့် ပြုပြင်ရမည်။
C.Technical ပံ့ပိုးမှု 24 နာရီအွန်လိုင်းတွင် TM, Skype, E-mail, ဆွေမျိုးမေးခွန်းများကိုအချိန်မီဖြေရှင်း။ မဖြေရှင်းနိုင်ပါက BOSSMAN သည် ပြုပြင်ရန်အတွက် ဆိုက်ဆိုက်မြိုက်မြိုက်ရောက်ရှိလာရန် အရောင်းအပြီး အင်ဂျင်နီယာအား ချက်ချင်းစီစဉ်ပေးမည်ဖြစ်ပြီး ဝယ်ယူသူသည် VISA ၊ လေယာဉ်လက်မှတ်များနှင့် နေရာထိုင်ခင်းအတွက် ပေးဆောင်ရန် လိုအပ်ပါသည်။
ဖောက်သည်၏ဆိုက်