Gantry အမျိုးအစား CNC တူးဖော်ခြင်းနှင့် ကြိတ်စက်

CNC Gantry Milling နှင့် Drilling Machine
Gantry တူးဖော်ခြင်းနှင့် ကြိတ်စက်
CNC Gantry ကြိတ်စက်
စက်လျှောက်လွှာ
BOSM gantry မိုဘိုင်း CNC မြန်နှုန်းမြင့် တူးဖော်ခြင်းနှင့် ကြိတ်စက်စီးရီးများကို ကြီးမားသော ပန်းကန်ပြားများ၊ လေအားပါဝါအနားကွပ်များ၊ ချပ်စ်များ၊ လက်စွပ်အစိတ်အပိုင်းများနှင့် ထိရောက်သောအကွာအဝေးအတွင်း အထူရှိသော အခြားလုပ်ကွက်များကို ထိရောက်စွာ တူးဖော်ခြင်းနှင့် လုပ်ဆောင်ခြင်းအတွက် အဓိကအားဖြင့် အသုံးပြုပါသည်။အပေါက်များနှင့် မျက်မမြင်အပေါက်များကို တစ်ခုတည်းသော ပစ္စည်းအစိတ်အပိုင်းများနှင့် ပေါင်းစပ်ပစ္စည်းများဖြင့် တူးဖော်နိုင်သည်။စက်ကိရိယာ၏ machining လုပ်ငန်းစဉ်ကို ဒစ်ဂျစ်တယ်စနစ်ဖြင့် ထိန်းချုပ်ထားပြီး လုပ်ဆောင်ချက်သည် အလွန်အဆင်ပြေပါသည်။၎င်းသည် အလိုအလျောက်စနစ်၊ မြင့်မားသောတိကျမှု၊ မျိုးစုံမျိုးကွဲများနှင့် အစုလိုက်အပြုံလိုက်ထုတ်လုပ်မှုကို သိရှိနိုင်သည်။ကွဲပြားခြားနားသောအသုံးပြုသူများ၏လုပ်ဆောင်မှုလိုအပ်ချက်များကိုဖြည့်ဆည်းရန်အတွက်ကုမ္ပဏီသည်နောက်ဆုံးအဆင့်ထုတ်ကုန်အမျိုးမျိုးကိုတီထွင်ခဲ့သည်။သမားရိုးကျ မော်ဒယ်များအပြင်၊ သုံးစွဲသူများ၏ အမှန်တကယ် လိုအပ်ချက်များအရ ၎င်းတို့ကို ဒီဇိုင်းဆွဲပြီး စိတ်ကြိုက်ပြင်ဆင်နိုင်သည်။

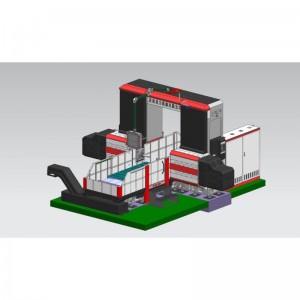
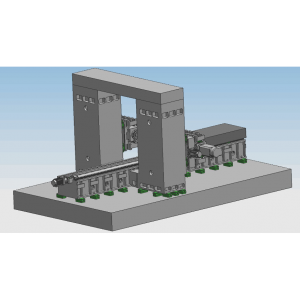
စက်ဖွဲ့စည်းပုံ
ဤစက်ပစ္စည်းများတွင် အဓိကအားဖြင့် အိပ်ရာအလုပ်စားပွဲ၊ ရွှေ့ပြောင်းနိုင်သောနေရာ၊ ရွှေ့ပြောင်းနိုင်သောလျှောကုန်းနှီး၊ တူးဖော်နိုင်သော ကြိတ်ခွဲပါဝါခေါင်း၊ အလိုအလျောက်ချောဆီစက်နှင့် အကာအကွယ်ကိရိယာ၊ လည်ပတ်နေသော အအေးပေးကိရိယာ၊ ဒစ်ဂျစ်တယ်ထိန်းချုပ်မှုစနစ်၊ လျှပ်စစ်စနစ်စသည်ဖြင့် ပါဝင်သည်။ Rolling guide ရထားလမ်းတွဲပံ့ပိုးမှုနှင့် လမ်းညွှန်မှု၊ တိကျမှု၊ ခဲဝက်အူတွဲဒရိုက်၊ စက်ကိရိယာသည် မြင့်မားသောနေရာချထားမှုတိကျမှုနှင့် ထပ်ခါတလဲလဲနေရာချထားမှုတိကျမှုရှိသည်။
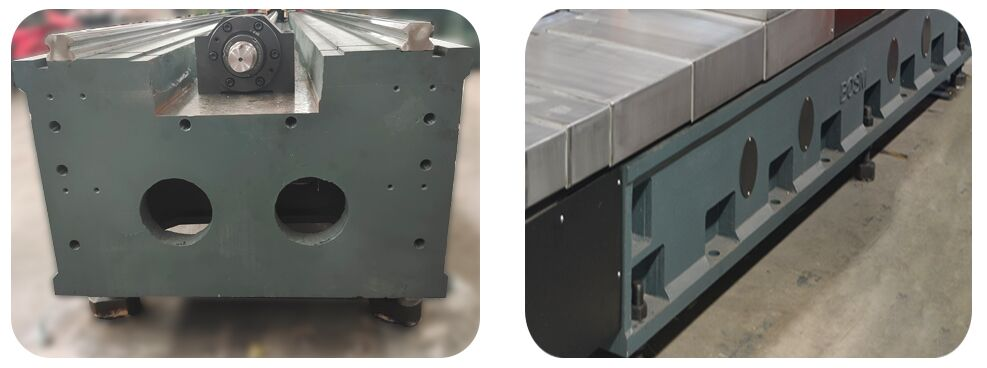
၁)အလုပ်စားပွဲ:
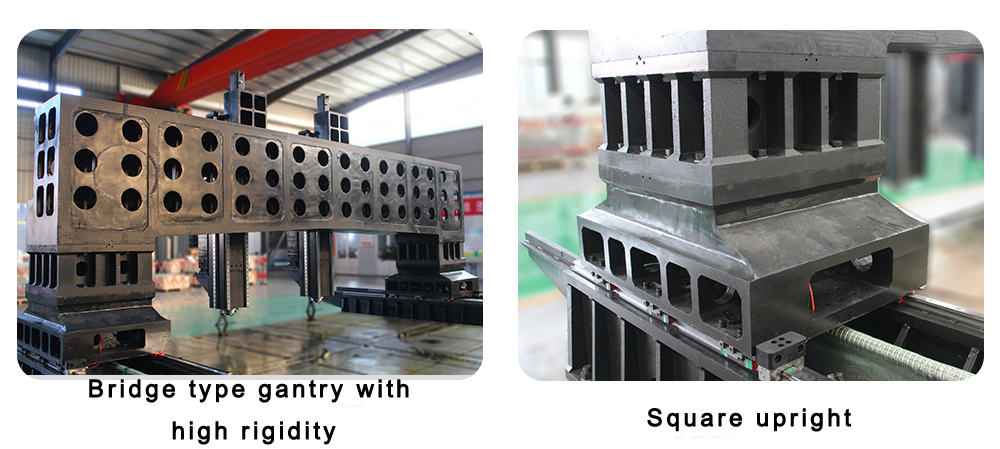
ကုတင်သည် တစ်ပိုင်းတစ်စ သွန်းလုပ်ခြင်းဖြစ်ပြီး၊ အလယ်အလတ် မွှေနှောက်ခြင်းနှင့် တုန်ခါမှု အိုမင်းခြင်း ကုသမှုပြီးနောက် ပြီးသွားကာ၊ ကောင်းမွန်သော ရွေ့လျားမှုနှင့် တည်ငြိမ်တောင့်တင်းမှုရှိပြီး ပုံပျက်ခြင်းမရှိဘဲ။workpieces များကို ကုပ်ရန် အတွက် အလုပ်စားပွဲ မျက်နှာပြင်ပေါ်တွင် ကျိုးကြောင်းဆီလျော်စွာ ပြီးမြောက်မှု ပုံစံရှိသော T-slot များ ရှိပါသည်။အိပ်ရာအောက်ခံတွင် တိကျမှုမြင့်မားသော မျဉ်းဖြောင့်လမ်းညွှန် ၂ ခု (စုစုပေါင်း နှစ်ဖက်စလုံးတွင် ၄ ခု) တပ်ဆင်ထားသောကြောင့် လမ်းညွှန်ဆလိုက်ဒါကို အညီအမျှ ဖိထားပြီး၊ စက်ကိရိယာ၏ တောင့်တင်းမှုနှင့် ၎င်း၏ ဆန့်နိုင်အားနှင့် ဖိသိပ်မှု ခံနိုင်ရည်တို့ကို ပိုမိုကောင်းမွန်စေသည်။ဒရိုက်စနစ်သည် AC ဆာဗာမော်တာများနှင့် တိကျသောဘောလုံးဝက်အူအတွဲများကို လက်ခံပါသည်။Side drive သည် gantry ကို X-axis ဦးတည်ရာသို့ ရွေ့လျားစေသည်။ချိန်ညှိနိုင်သော bolts များကို ကုတင်၏အောက်ခြေမျက်နှာပြင်ပေါ်တွင် ဖြန့်ဝေထားပြီး၊ ကုတင်၏အလုပ်စားပွဲအဆင့်ကို အလွယ်တကူချိန်ညှိနိုင်သည်။
၂)MovingGantry :
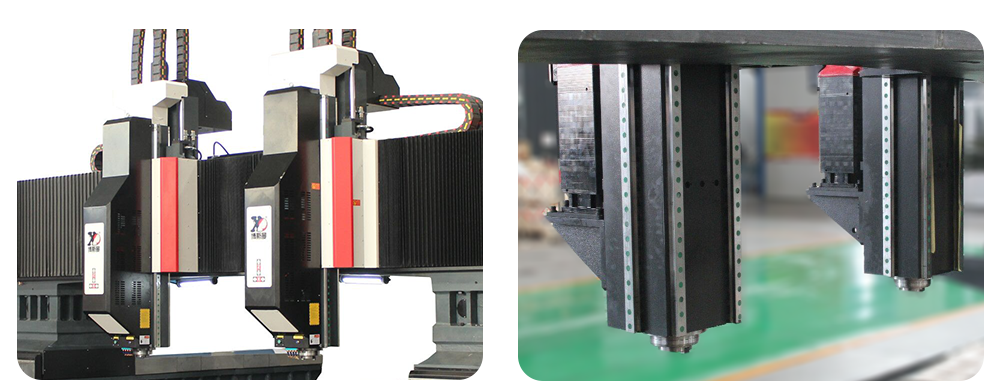
ရွှေ့ပြောင်းနိုင်သော ဂါထရီကို မီးခိုးရောင်သံ (HT250) ဖြင့် သွန်းလုပ်ထားသည်။55# အလွန်မြင့်မားသော ဝက်ဝံစွမ်းရည် rolling linear guide pairs နှစ်ခုကို gantry ၏အရှေ့ဘက်ခြမ်းတွင် တပ်ဆင်ထားသည်။တိကျသောဘောလုံးဝက်အူအတွဲနှင့် ဆာဗာမော်တာတစ်ခုသည် Y-ဝင်ရိုးဦးတည်ရာသို့ရွေ့လျားရန် ပါဝါခေါင်းလျှောကိုပြုလုပ်ပေးပြီး တူးဖော်ပါဝါခေါင်းကို ပါဝါခေါင်းဆလိုက်ပေါ်တွင် တပ်ဆင်ထားသည်။တိကျစွာချိတ်ဆက်မှုမှတဆင့် servo motor မှမောင်းနှင်သောဘောလုံးဝက်အူပေါ်ရှိ ball screw nut ၏လှည့်ခြင်းဖြင့် Gantry ၏လှုပ်ရှားမှုကိုနားလည်သည်။
3)Movingလျှောကုန်းနှီး:
လျှောကုန်းနှီးသည် တိကျသော သံထည်ဖွဲ့စည်းပုံဖြစ်သည်။လျှောကုန်းနှီးတွင် အလွန်မြင့်မားသောဝန်ထမ်း CNC လိုင်းနားရထားဆလိုက်နှစ်ခု၊ တိကျသောဘောလုံးဝက်အူအတွဲများနှင့် servo မော်တာသို့ချိတ်ဆက်ထားသော တိကျသေချာသောဂြိုလ်လျှော့ကိရိယာအစုံပါရှိပြီး နိုက်ထရိုဂျင်လက်ကျန်ဆလင်ဒါ တပ်ဆင်ထားပြီး၊ အလေးချိန်ကိုချိန်ခွင်လျှာညှိပါ။ ပါဝါခေါင်း၊ ခဲဝက်အူ၏ဝန်ကို လျှော့ချပါ၊ ခဲဝက်အူ၏ သက်တမ်းကို တိုးမြှင့်ပါ၊ Z-ဝင်ရိုး ဦးတည်ရာသို့ ရွေ့လျားရန် တွင်းတူးပါဝါခေါင်းကို မောင်းနှင်ပါ၊ ရှေ့သို့ လျင်မြန်စွာ လုပ်ဆောင်ပါ၊ ရှေ့သို့ အလုပ်လုပ်ပါ၊ အမြန်ပြောင်းပြန်ပါ၊ လုပ်ဆောင်ချက်များကို ရပ်လိုက်ပါ။ အလိုအလျောက် Chip ကွဲခြင်း၊ ချစ်ပ်ဖယ်ရှားခြင်း၊ ခေတ္တရပ်ခြင်း လုပ်ဆောင်ချက်ပါရှိသော ပါဝါခေါင်း။
4)တူးဖော်ပါဝါခေါင်း(ဗိုင်းလိပ်တံ):
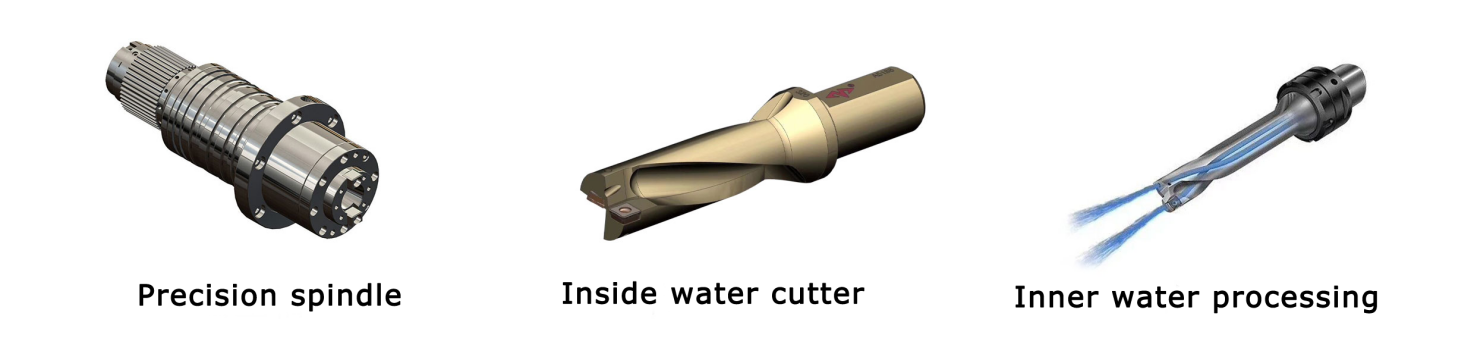
တွင်းတူးပါဝါခေါင်းသည် torque တိုးမြှင့်ရန်နှင့် အထူးတိကျသော ဗိုင်းလိပ်တံကို မောင်းနှင်ရန် toothed synchronous belt deceleration ဖြင့် မောင်းနှင်သည့် သီးခြား servo spindle motor ကို လက်ခံပါသည်။spindle သည် ခြေလှမ်းကင်းသော မြန်နှုန်းပြောင်းလဲမှုကို ရရှိရန် ဂျပန် angular contact bearings ၏ ပထမလေးခုနှင့် နောက်ဘက် ခြောက်တန်းနှစ်ခုကို လက်ခံပါသည်။ဗိုင်းလိပ်တံတွင် ကိရိယာကိုပြုလုပ်ရန် pneumatic tool change system တပ်ဆင်ထားပြီး အစားထိုးခြင်းသည် မြန်ဆန်လွယ်ကူပြီး feed အား servo motor နှင့် ball screw ဖြင့် မောင်းနှင်ပါသည်။X နှင့် Y axes များကို linear နှင့် circular interpolation လုပ်ဆောင်ချက်များကို သိရှိနိုင်စေသည့် semi-closed loop control ကို အသုံးပြု၍ ချိတ်ဆက်နိုင်သည်။spindle end သည် BT50 taper hole ဖြစ်ပြီး မြန်နှုန်းမြင့် U-drilling center ဖြင့် လုပ်ဆောင်နိုင်သည့် Italian Rotofors high-speed rotary joint ပါရှိသည်။
4.1 တူးဖော်ခြင်းပါဝါဦးခေါင်း၏ သေတ္တာကိုယ်ထည်နှင့် လျှောစားပွဲအား ၎င်းတို့၏ တောင့်တင်းမှုနှင့် တည်ငြိမ်မှုကို မြှင့်တင်ရန်နှင့် တုန်ခါမှုနှင့် ဆူညံသံများကို လျှော့ချရန် သွန်းဖြင့် ပြုလုပ်ထားသည်။
4.2 စက်ကိရိယာအား အီလက်ထရွန်းနစ်လက်ကိုင်ဘီးဖြင့် လည်ပတ်နိုင်သည်။အချိန်ကုန်သက်သာပြီး ထုတ်လုပ်မှုစွမ်းဆောင်ရည်ကို မြှင့်တင်ရန်အတွက်၊ အစာကျွေးသည့်နေရာကို သတ်မှတ်ရန် ပထမအပေါက်ကို တူးဖော်ပြီးနောက်၊ အလားတူကျန်ရှိသောတွင်းများကို တူးဖော်ခြင်း → အလုပ်ကြိုတင် → မြန်ဆန်သော နောက်ပြန်လှည့်နိုင်ရန် ၎င်းသည် အလိုအလျောက်ချစ်ပ်ပြားကဲ့သို့သော လုပ်ဆောင်ချက်များပါ၀င်သည် ။ ဖောက်ထွင်းခြင်း၊ ချစ်ပ်ဖယ်ရှားခြင်းနှင့် ခေတ္တရပ်ခြင်း။
4.3 ram တွင် Z-ဝင်ရိုးဝန်ကို လျှော့ချရန်နှင့် Z-ဝင်ရိုးဝက်အူ၏ ဝန်ဆောင်မှုသက်တမ်းကို တိုးမြှင့်ရန်အတွက် အရည်နိုက်ထရိုဂျင်ဟန်ချက်စနစ် တပ်ဆင်ထားသည်။
4.4 Z-axis servo motor သည် spindle box ပြုတ်ကျခြင်းကြောင့် မတော်တဆမှုမဖြစ်စေရန် ပါဝါရုတ်တရက်ဖြတ်လိုက်သောအခါ ဘရိတ်ကိုထိန်းထားပေးသည့် power-off brake motor ကိုလက်ခံပါသည်။
4.5 ခေါင်းစွပ်
၄.၅.၁။ပင်မရိုးတံဘောက်စ်တွင် လေးလံသော လိုင်းနားလမ်းညွှန်များ ပါ၀င်ပြီး ရွေ့လျားမှု၏ တောင့်တင်းမှု၊ မြင့်မားသော နေရာချထားမှု တိကျမှုနှင့် မြန်နှုန်းနိမ့်တည်ငြိမ်မှုတို့နှင့်အတူ လေးခုကို လက်ခံပါသည်။
၄.၅.၂။Z-axis drive- servo motor သည် coupling မှတဆင့် ball screw နှင့် တိုက်ရိုက်ချိတ်ဆက်ထားပြီး၊ ball screw သည် Z-axis feed ကိုသိရှိနိုင်ရန် ကုန်းနှီးပေါ်တွင် အပေါ်နှင့်အောက်ရွှေ့ရန် headstock ကို မောင်းနှင်ပါသည်။Z-axis မော်တာတွင် အလိုအလျောက် ဘရိတ်လုပ်ဆောင်ချက် ပါရှိသည်။ပါဝါချို့ယွင်းသောအခါတွင်၊ လည်ပတ်ခြင်းမှကာကွယ်ရန် မော်တာရိုးတံကို တင်းတင်းကြပ်ကြပ်ဆုပ်ကိုင်ထားသည်။
၄.၅.၃။spindle အုပ်စုသည် တိကျပြီး မြင့်မားသော စွမ်းဆောင်ရည်ရှိသော ထိုင်ဝမ် Jianchun မြန်နှုန်းမြင့် အတွင်းပိုင်း ရေထွက်ပေါက် ဗိုင်းလိပ်တံကို လက်ခံပါသည်။ပင်မရိုးတံသည် ပင်မရိုးရိုးပေါ်ရှိ လိပ်ပြာစပရိန်ဖြင့် ဓားကို အပိုင်းလေးပိုင်း broach ယန္တရားမှတစ်ဆင့် ကိရိယာလက်ကိုင်၏ ဆွဲသံလက်သည်းပေါ်တွင် တင်းမာမှုအားသက်ရောက်သဖြင့် ဓားကို ဆုပ်ကိုင်ထားပြီး ဖြည်သည့်ကိရိယာသည် pneumatic နည်းလမ်းကို လက်ခံသည်။
5)အလိုအလျောက်ချောဆီစက်နှင့် အကာအကွယ်ကိရိယာ
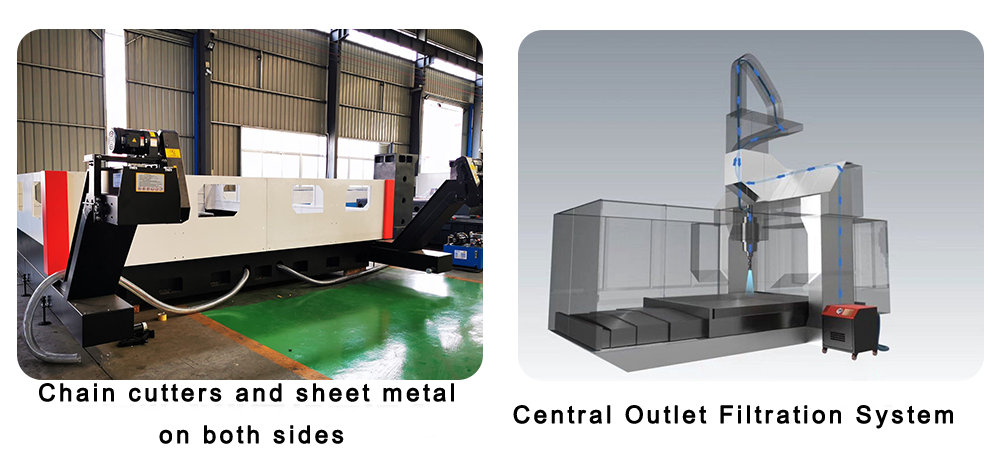
workbench ၏နှစ်ဖက်စလုံးတွင်အလိုအလျောက် chip conveyor ရှိပြီးအဆုံးတွင် filter တစ်ခုရှိသည်။အလိုအလျောက် chip conveyor သည် flat chain အမျိုးအစားဖြစ်သည်။တစ်ဖက်တွင် အအေးခံပန့်တစ်ခု တပ်ဆင်ထားပြီး ထွက်ပေါက်ကို ပိုက်ဖြင့် ဗဟိုရေစစ်ထုတ်စနစ်သို့ ချိတ်ဆက်ထားသည်။အအေးခံသည် chip conveyor အတွင်းသို့ စီးဝင်သည်၊ chip conveyor lift pump သည် coolant ကို အလယ်ပိုင်း outlet filter system သို့ စုပ်ထုတ်ပြီး high-pressure cooling pump သည် filtered coolant ကို spindle drilling cooling သို့ လှည့်ပတ်ပါသည်။ချစ်ပ်များသယ်ယူရာတွင် အလွန်အဆင်ပြေသည့် ချစ်ပ်သယ်ယူပို့ဆောင်ရေးတွန်းလှည်းကိုလည်း တပ်ဆင်ထားသည်။ဤကိရိယာတွင် အတွင်းပိုင်းနှင့် ပြင်ပကိရိယာ အအေးပေးစနစ်များ တပ်ဆင်ထားသည်။မြန်နှုန်းမြင့်တူးဖော်ခြင်းကိုအသုံးပြုသောအခါ၊ ကိရိယာ၏အတွင်းပိုင်းအအေးခံခြင်းကိုအသုံးပြုပြီး အလင်းကြိတ်ခွဲခြင်းအတွက် ပြင်ပအအေးကိုအသုံးပြုသည်။
၅.၁။ဗဟိုထွက်ပေါက်ရေစစ်ထုတ်စနစ်-
ဤစက်ကိရိယာသည် အအေးခံတွင်းရှိ အညစ်အကြေးများကို ထိရောက်စွာ စစ်ထုတ်နိုင်သည့် ဗဟိုရေစစ်စနစ် တပ်ဆင်ထားသည်။အတွင်းပိုင်းရေဖြန်းစနစ်သည် လုပ်ဆောင်နေစဉ်အတွင်း သံတံများကို ကိရိယာပေါ်တွင် တွယ်ကပ်ခြင်းမှ တားဆီးနိုင်ပြီး၊ ကိရိယာဝတ်ဆင်မှုကို လျှော့ချနိုင်ကာ ကိရိယာ၏သက်တမ်းကို သက်တမ်းတိုးစေကာ လုပ်ငန်းခွင်၏ မျက်နှာပြင်ကို မြှင့်တင်ပေးနိုင်သည်။ကိရိယာထိပ်ဖျားသည် ဖိအားမြင့်ရေထုတ်လွှတ်သည့် pin သည် အလုပ်အပိုင်း၏မျက်နှာပြင်ကို ကောင်းစွာကာကွယ်နိုင်ပြီး၊ မြန်နှုန်းမြင့် rotary အဆစ်ကိုကာကွယ်ပေးကာ၊ rotary အဆစ်ကိုပိတ်ဆို့ခြင်းမှအညစ်အကြေးများကိုတားဆီးကာ၊ workpiece တစ်ခုလုံး၏အရည်အသွေးကိုတိုးတက်စေပြီး အလုပ်စွမ်းဆောင်ရည်ကိုမြှင့်တင်ပေးသည်။
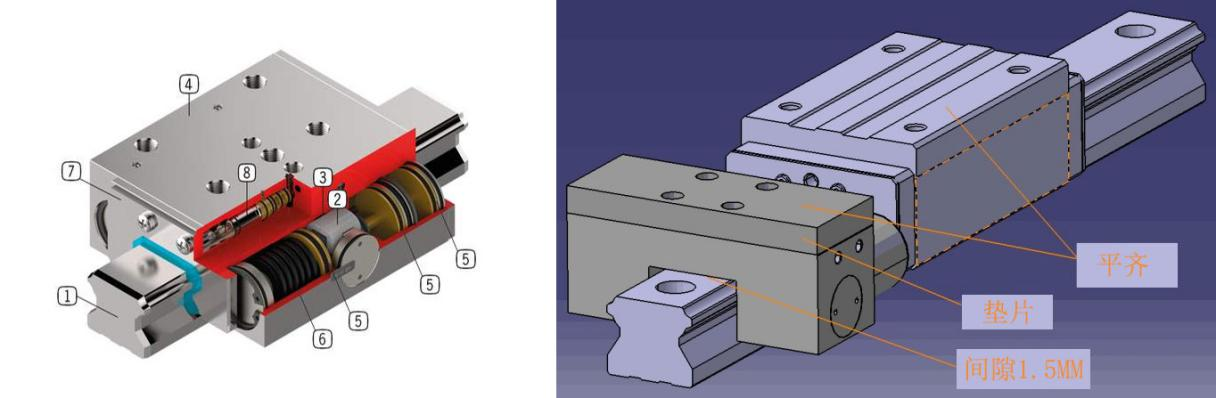
၆)Linear Clamper:
ကုပ်သည် ကုပ်၏အဓိကကိုယ်ထည်၊ actuators စသည်တို့ဖြင့် ဖွဲ့စည်းထားသည်။ ၎င်းသည် rolling linear guide pair နှင့် တွဲဖက်အသုံးပြုသည့် စွမ်းဆောင်ရည်မြင့်မားသည့် အစိတ်အပိုင်းတစ်ခုဖြစ်သည်။သပ်တုံးတွန်းအားချဲ့ထွင်ခြင်းနိယာမအားဖြင့်၊ ၎င်းသည် ခိုင်ခံ့သော ကုပ်ကြိုးကိုထုတ်ပေးသည်။၎င်းတွင် တင်းမာမှုကို မြှင့်တင်ရန်အတွက် ပုံသေ gantry၊ တိကျသောနေရာချထားမှု၊ တုန်ခါမှုဆန့်ကျင်ခြင်းနှင့် တင်းမာမှုတိုးတက်စေသော Function ပါရှိသည်။
၎င်းတွင်အောက်ပါလက္ခဏာများရှိသည်။
ဘေးကင်းပြီး ယုံကြည်စိတ်ချရသော၊ ခိုင်ခံ့သောကုပ်ဆွဲမှု၊ တူးဖော်ခြင်းနှင့် ခြစ်ခြင်းလုပ်ဆောင်နေစဉ်အတွင်း မရွေ့လျားသော XY ဝင်ရိုးကို ကုပ်ထားသည်။
အလွန်မြင့်မားသော ကုပ်ဆွဲအားသည် axial feed ၏ တောင့်တင်းမှုကို တိုးစေပြီး တုန်ခါမှုကြောင့် ဖြစ်ပေါ်လာသော စိတ်အနှောင့်အယှက်များကို တားဆီးပေးသည်။
လျင်မြန်သောတုံ့ပြန်မှု၊ အဖွင့်နှင့်အပိတ်တုံ့ပြန်ချိန်သည် 0.06 စက္ကန့်သာရှိပြီး စက်ကိရိယာကိုကာကွယ်နိုင်ပြီး ခဲဝက်အူ၏သက်တမ်းကိုတိုးစေသည်။
တာရှည်ခံ၊ နီကယ်ဖြင့်ပြုလုပ်ထားသော မျက်နှာပြင်၊ သံချေးတက်ခြင်း စွမ်းဆောင်ရည် ကောင်းမွန်သည်။
တင်းကျပ်သည့်အခါ တင်းကျပ်သော ထိခိုက်မှုမဖြစ်စေရန် ဆန်းသစ်သောဒီဇိုင်း။
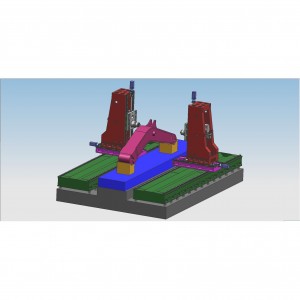
၇)workpiece ကို နေရာချထားခြင်းနှင့် ကုပ်ခြင်း။
round flange workpiece alignment အတွက်၊ ၎င်းကို T-slots များဖြင့် support plate ပေါ်တွင် ထင်သလို ချထားနိုင်ပြီး workpiece ပေါ်ရှိ မည်သည့်သုံးမှတ် (အတွင်းအချင်း သို့မဟုတ် အပြင်အချင်း) ရှိသည့် spindle taper hole တွင် ထည့်သွင်းထားသော edge finder ဖြင့် အလယ်ဗဟိုအနေအထားကို တိုင်းတာသည်။ .ထို့နောက် တိကျမြန်ဆန်သည့် ဂဏန်းထိန်းချုပ်မှုပရိုဂရမ်တွက်ချက်မှုဖြင့် ၎င်းကို အလိုအလျောက်ရရှိမည်ဖြစ်သည်။အလုပ်ခွင်၏ ကုပ်ကုပ်ကို နှိပ်ပန်းကန်ပြား၊ ထုတ်လွှတ်သည့်တံ၊ လည်စည်းနှင့် ကူရှင်တုံးတို့ပါရှိသော ကုပ်ဖြင့် ကုပ်သည်။
၈)အလိုအလျောက်ချောဆီစက်
ဤစက်ကိရိယာသည် ထိုင်ဝမ်၏ မူရင်း volumetric တစ်စိတ်တစ်ပိုင်းဖိအား အလိုအလျောက် ချောဆီစက်တွင် တပ်ဆင်ထားပြီး၊ လမ်းပြသံလမ်းများ၊ ခဲဝက်အူများ၊ ထိန်သိမ်းများ စသည်တို့ကဲ့သို့ ရွေ့လျားမှုအတွဲများကို အလိုအလျောက် ချောဆီပေးကာ စက်ကိရိယာ၏ ဝန်ဆောင်မှုသက်တမ်းကို သေချာစေသည်။စက်ကုတင်၏နှစ်ဖက်စလုံးရှိ လမ်းပြသံလမ်းများတွင် သံမဏိအကာအကွယ်အဖုံးများတပ်ဆင်ထားပြီး၊ ရွေ့လျားနေသော gantry ပါဝါခေါင်း၏နှစ်ဖက်စလုံးတွင် ပြောင်းလွယ်ပြင်လွယ်အကာအကွယ်အဖုံးများတပ်ဆင်ထားသည်။အလုပ်စားပွဲပတ်လည်တွင် ရေစိုခံအကာများကို တပ်ဆင်ထားပြီး ရေပိုက်လိုင်းကို ပလပ်စတစ်ဆွဲကြိုးဖြင့် အကာအကွယ်ပေးထားသည်။ဗိုင်းလိပ်တံပတ်ပတ်လည်တွင် ပျော့ပျောင်းသော ဖောက်ထွင်းမြင်ရသော PVC ကန့်လန့်ကာကို တပ်ဆင်ထားသည်။

၉)ဒစ်ဂျစ်တယ် CNC ထိန်းချုပ်ကိရိယာ အပြည့်အစုံ-
၉.၁။chip breaking function ဖြင့်၊ chip breaking time နှင့် chip breaking cycle ကို man-machine interface တွင် သတ်မှတ်နိုင်ပါသည်။
၉.၂။tool lifting function ဖြင့် tool lifting height ကို man-machine interface တွင် သတ်မှတ်နိုင်သည်။ဤအမြင့်သို့ တူးဖော်သည့်အခါ၊ တူးသည့်ဘစ်ကို အလုပ်အပိုင်း၏ထိပ်သို့ လျင်မြန်စွာ မြှောက်လိုက်ပြီး မုတ်ဆိတ်ရိတ်ကာ၊ ထို့နောက် တူးဖော်သည့်မျက်နှာပြင်သို့ အမြန်သွားကာ အလုပ်အကျွေးအဖြစ် အလိုအလျောက် ပြောင်းသွားပါသည်။
၉.၃။ဗဟိုချုပ်ကိုင်မှုရှိသော လည်ပတ်ထိန်းချုပ်မှုသေတ္တာနှင့် လက်ကိုင်ယူနစ်သည် ကိန်းဂဏန်းထိန်းချုပ်မှုစနစ်ကို လက်ခံကျင့်သုံးပြီး USB မျက်နှာပြင်နှင့် LCD အရည်ပုံဆောင်ခဲမျက်နှာပြင် တပ်ဆင်ထားသည်။ပရိုဂရမ်ရေးဆွဲခြင်း၊ သိမ်းဆည်းခြင်း၊ ပြသခြင်းနှင့် ဆက်သွယ်ရေးကို လွယ်ကူချောမွေ့စေရန်အတွက်၊ လည်ပတ်မှု အင်တာဖေ့စ်တွင် လူ-စက် ဆွေးနွေးမှု၊ အမှားအယွင်း လျော်ကြေးပေးခြင်းနှင့် အလိုအလျောက် အချက်ပေးစနစ်တို့ကဲ့သို့သော လုပ်ဆောင်ချက်များ ပါရှိသည်။
၉.၄။စက်ကိရိယာတွင် လည်ပတ်ရန် အလွန်အဆင်ပြေသည့် မလုပ်ဆောင်မီ အပေါက်အနေအထားကို အစမ်းကြည့်ရှုခြင်းနှင့် ပြန်လည်စစ်ဆေးခြင်း လုပ်ဆောင်ချက်ပါရှိသည်။

၁၀)အလင်းအစွန်းရှာဖွေသူ-
စက်ကိရိယာတွင် photoelectric edge finder တပ်ဆင်ထားသောကြောင့် workpiece ၏အနေအထားကို အဆင်ပြေမြန်ဆန်စွာ ရှာဖွေနိုင်သည်။
1) edge finder ကို စက်ကိရိယာ၏ spindle chuck တွင် ထည့်သွင်းပြီး ၎င်း၏ concentricity ကိုပြင်ရန် spindle ကို ဖြည်းညှင်းစွာ လှည့်ပါ။
2) အစွန်းရှာဖွေသူ၏သံမဏိဘောလုံး၏အစွန်းသည် workpiece ကို ပေါ့ပေါ့တန်တန်ထိမိစေရန်၊ အနီရောင်မီးပွင့်သွားစေရန် ဒိုင်းလိပ်တံကို လက်ကိုင်ဘီးဖြင့်ရွှေ့ပါ။ဤအချိန်တွင် edge finder ၏ steel ball သည် workpiece ကိုထိသည့် အကောင်းဆုံးအမှတ်ကိုရှာဖွေရန် spindle ကို ရှေ့နှင့်နောက်သို့ အကြိမ်ကြိမ်ရွှေ့နိုင်သည်။.
3) ယခုအချိန်တွင် CNC စနစ်မှပြသသော X နှင့် Y ဝင်ရိုးတန်ဖိုးများကို မှတ်တမ်းတင်ပြီး ကွန်ပျူတာတွင် ဖြည့်စွက်ပါ။
4) ဤနည်းဖြင့် များစွာသော ထောက်လှမ်းမှု အမှတ်များကို ရှာပါ။
11)အချက်ပေးကိရိယာဝတ်ဆင်ခြင်း။
tool wear alarm သည် အဓိကအားဖြင့် spindle motor ၏ current ကို စစ်ဆေးသည်။လက်ရှိသတ်မှတ်ထားသည့်တန်ဖိုးထက်ကျော်လွန်သောအခါ၊ ကိရိယာသည် ကိရိယာပျက်သွားသည်ကို အလိုအလျောက်စီရင်မည်ဖြစ်ပြီး၊ ဗိုင်းလိပ်တံသည် ဤအချိန်တွင်တူးလ်အား အလိုအလျောက်ပြန်လည်ရုပ်သိမ်းမည်ဖြစ်ပြီး အလိုအလျောက်ပရိုဂရမ်သည် ပြီးဆုံးမည်ဖြစ်သည်။ကိရိယာ ပျက်သွားကြောင်း အော်ပရေတာအား သတိပေးပါ။
၁၂)ရေအဆင့်နှိုးဆော်သံ
1) filter ရှိ coolant သည် အလယ်အလတ်အဆင့်တွင် ရှိနေသောအခါ၊ စနစ်သည် စတင်ရန်အတွက် motor သို့ အလိုအလျောက် ချိတ်ဆက်ပြီး chip conveyor ရှိ coolant သည် filter ထဲသို့ အလိုအလျောက် စီးဆင်းသွားပါသည်။အမြင့်သို့ရောက်သောအခါ မော်တာသည် အလိုအလျောက် အလုပ်မလုပ်တော့ပါ။
2) Filter အတွင်းရှိ coolant သည် အဆင့်နိမ့်သောအခါ၊ စနစ်သည် အဆင့်တိုင်းကိရိယာကို အချက်ပြရန် အလိုအလျောက် အချက်ပြမည်ဖြစ်ပြီး၊ ဗိုင်းလိပ်တံသည် ကိရိယာကို အလိုအလျောက် ပြန်လည်ရုပ်သိမ်းမည်ဖြစ်ပြီး စက်သည် အလုပ်မလုပ်တော့မည်ဖြစ်သည်။
13) မမ်မိုရီ လုပ်ဆောင်ချက်ကို ပါဝါပိတ်ပါ။
ရုတ်တရက် ပါဝါချို့ယွင်းမှုကြောင့် လည်ပတ်မှုရပ်တန့်ခြင်းကြောင့်၊ ဤလုပ်ဆောင်ချက်သည် ဓာတ်အားမအောင်မြင်မီ တူးဖော်ထားသော နောက်ဆုံးအပေါက်၏ အနေအထားကို လျင်မြန်လွယ်ကူစွာ ရှာဖွေနိုင်မည်ဖြစ်သည်။အော်ပရေတာများသည် ရှာဖွေချိန်ကို သက်သာစေပြီး နောက်တစ်ဆင့်သို့ လျင်မြန်စွာ ဆက်လက်လုပ်ဆောင်နိုင်သည်။
ဝင်ရိုးသုံးလေဆာစစ်ဆေးခြင်း-
Bosman ၏ စက်တစ်ခုစီကို ဗြိတိန်ကုမ္ပဏီ RENISHAW ၏ လေဆာ interferometer ဖြင့် ချိန်ညှိထားပြီး စက်၏ တက်ကြွတည်ငြိမ်မှု၊ တည်ငြိမ်မှုနှင့် စီမံဆောင်ရွက်ပေးမှု တိကျသေချာစေရန်အတွက် တိကျစွာ စစ်ဆေးပြီး ပေးချေပေးသည့် pitch error၊ backlash၊ positioning accuracy၊ .Ballbar စစ်ဆေးခြင်း စက်တစ်ခုစီသည် စက်ဝိုင်းပုံတိကျမှုနှင့် စက်ဂျီဩမေတြီတိကျမှုကို ချိန်ညှိရန် ဗြိတိသျှ RENISHAW ကုမ္ပဏီမှ ဘော်ဘားကို အသုံးပြုသည်။တစ်ချိန်တည်းမှာပင်၊ စက်၏ 3D စက်၏တိကျမှုနှင့် စက်ဝိုင်းတိကျမှုကို သေချာစေရန် စက်ဝိုင်းဖြတ်စမ်းသပ်မှုတစ်ခု ပြုလုပ်ပါသည်။

ပလပ်ဖောင်းအပြင်အဆင်၊ အလုပ်ခွင်ကွပ်ခြင်း၊ အလိုအလျောက် ချစ်ပ်ဖယ်ရှားခြင်း လိုအပ်ချက်များ
1. ပင်မပလပ်ဖောင်း (1 pcs): T-slot ကုပ်နေသောအလုပ်အပိုင်းအစ။ပင်မပလပ်ဖောင်း၏ အပေါ်ဘက်မျက်နှာပြင်နှင့် ဘေးဘက်မျက်နှာပြင် နှစ်ခုလုံးကို စီမံဆောင်ရွက်သည့် နေရာချထားသည့် မျက်နှာပြင်များအဖြစ် အသုံးပြုနိုင်သည်။
2. နစ်မြုပ်သည့်ပလပ်ဖောင်း (1 pcs): (ဘေးဘက်တွင် အရန်ဖိ-တပ်ဆင်ထားသော ဖရိန်ကို တပ်ဆင်ထားပြီး၊ ထိပ်ပိုင်းတွင် ရောင်းချသူမှ ဒီဇိုင်းထုတ်ပြီး တပ်ဆင်ထားသည့် အကာအကွယ်အပြည့်ဖြင့် တပ်ဆင်ထားသည်)၊ ပင်မလုပ်ငန်းခွင်နေရာချထားခြင်းနှင့် လုပ်ဆောင်ခြင်းဆိုင်ရာ ညွှန်ကြားချက်များ-
Valve အဖုံးကို လုပ်ဆောင်ခြင်း- အောက်ပလပ်ဖောင်း (အောက်ခြေ ပံ့ပိုးလက်ကိုင်နှင့် အရွယ်အစားအမျိုးမျိုးရှိသော အလုပ်အပိုင်းအစများ)၊ အပေါ်ပိုင်းဖိအားပြားကို နှိပ်ခြင်းဖြင့် ပြင်ဆင်သည် သို့မဟုတ် ရောင်းချသူသည် အလိုအလျောက် ထိပ်ကုပ်ကိရိယာကို ဒီဇိုင်းဆွဲသည်။
Valve ကိုယ်ထည်လုပ်ဆောင်ခြင်း- အောက်ပလပ်ဖောင်းကို နေရာချထားခြင်း (အရွယ်အစားအမျိုးမျိုးရှိသော အောက်ခြေအထောက်ကူပြုလက်ကိုင်များနှင့် အလုပ်အပိုင်းအစများ)၊ အောက်ပလပ်ဖောင်း၏ အရန်ကော်လံများ၏ ဘေးဘက်လက်ကိုင်များနှင့် L ပုံသဏ္ဌာန်ဆက်စပ်ပစ္စည်းများ ထုတ်လွှတ်သည့်ချောင်းများကို ဖိထားပြီး ပြင်ဆင်ထားသည် သို့မဟုတ် ရောင်းချသူသည် အလိုအလျောက်ထိပ်ပိုင်းဒီဇိုင်းပြုလုပ်သည် ကုပ်ကိရိယာ။

သတ်မှတ်ချက်
| မော်ဒယ် | BOSM-DS3030 | BOSM-DS4040 | BOSM-DS5050 | BOSM-DS6060 | |
| လုပ်ငန်းအရွယ်အစား | အလျား*အနံ | 3000*3000 | 4000*4000 | 5000*5000 | 6000*6000 |
| Vertical Drilling Head | ဗိုင်းလိပ်တံသွယ် | BT50 | |||
| Drilling Diameter (mm) | φ96 | ||||
| အချင်း (မီလီမီတာ) | M36 | ||||
| Spindle Speed (r/min) | 30~3000/60~6000 | ||||
| Spindle Motor ပါဝါ (kw) | ၂၂/၃၀/၃၇ | ||||
| Spindle Nose မှ Table အကွာအဝေး | ဖောင်ဒေးရှင်းအရ သိရသည်။ | ||||
| ထပ်တလဲလဲ နေရာချထားခြင်း တိကျမှု (X/Y/Z) | X/Y/Z | ±0.01/1000mm | |||
| ထိန်းချုပ်မှုစနစ် | KND/GSK/SIEMENS | ||||
| မဂ္ဂဇင်းတူးလ် | စိတ်ကြိုက်ရွေးချယ်နိုင်သောကိရိယာ 24 ခုပါသော Okada မဂ္ဂဇင်းတူးလ် | ||||
အရည်အသွေးစစ်ဆေးခြင်း။
Bosman ၏ စက်တစ်ခုစီကို United Kingdom RENISHAW ကုမ္ပဏီမှ လေဆာ interferometer ဖြင့် ချိန်ညှိထားပြီး pitch error ၊ backlash ၊ positioning accuracy နှင့် ထပ်ခါတလဲလဲ positioning တိကျမှုကို သေချာစေရန် စက်၏ dynamic ၊ static stability နှင့် processing accuracy အတွက် တိကျစွာစစ်ဆေးပြီး ပေးလျော်ပါသည်။.Ball bar စမ်းသပ်စက်တစ်ခုစီသည် စက်ဝိုင်းပုံတိကျမှုနှင့် စက်ဂျီဩမေတြီတိကျမှုကို ပြုပြင်ရန်နှင့် စက်၏ 3D စက်တိကျမှုနှင့် စက်ဝိုင်းတိကျမှုကိုသေချာစေရန် စက်ဝိုင်းပုံဖြတ်ခြင်းစမ်းသပ်မှုများကို လုပ်ဆောင်ရန် စက်တစ်ခုစီသည် ဗြိတိန် RENISHAW ကုမ္ပဏီမှ ဘော်လုံးဘားစမ်းသပ်ကိရိယာကို အသုံးပြုပါသည်။

စက်ကိရိယာအသုံးပြုမှုပတ်ဝန်းကျင်
1.1 စက်ကိရိယာ ပတ်ဝန်းကျင် လိုအပ်ချက်
ပတ်ဝန်းကျင် အပူချိန်ကို အဆက်မပြတ် ထိန်းသိမ်းခြင်းသည် တိကျစွာ စက်ပစ္စည်းအတွက် မရှိမဖြစ် အရေးကြီးသော အချက်ဖြစ်သည်။
(1) ရရှိနိုင်သော ပတ်ဝန်းကျင် အပူချိန်မှာ -10 ℃ ~ 35 ℃ ဖြစ်သည်။ပတ်ဝန်းကျင် အပူချိန် 20 ℃ ရှိသောအခါ စိုထိုင်းဆသည် 40 ~ 75% ဖြစ်သင့်သည်။
(၂) သတ်မှတ်ထားသော အကွာအဝေးအတွင်း စက်ကိရိယာ၏ တည်ငြိမ်တိကျမှုကို ထိန်းထားနိုင်ရန်၊ အကောင်းဆုံး ပတ်ဝန်းကျင်အပူချိန်သည် အပူချိန် ကွာခြားချက် 15°C မှ 25°C ရှိရန် လိုအပ်ပါသည်။
± 2 ℃ / 24h ထက်မပိုသင့်ပါ။
1.2 ပါဝါထောက်ပံ့မှု ဗို့အား- 3-အဆင့်၊ 380V၊ ဗို့အားအတက်အကျ ± 10% အတွင်း ပါဝါထောက်ပံ့မှု အကြိမ်ရေ- 50HZ။
1.3 အသုံးပြုမှုဧရိယာရှိ ဗို့အားမတည်ငြိမ်ပါက၊ စက်ကိရိယာ၏ပုံမှန်လည်ပတ်မှုကိုသေချာစေရန်အတွက် စက်ကိရိယာအား ထိန်းညှိပါဝါထောက်ပံ့မှုတစ်ခု တပ်ဆင်ထားသင့်သည်။
၁.၄။စက်ကိရိယာတွင် ယုံကြည်စိတ်ချရသော မြေပြင်ရှိသင့်သည်- မြေစိုက်ဝါယာကြိုးသည် ကြေးနီဝါယာကြိုးဖြစ်ပြီး ဝါယာအချင်းသည် 10mm² ထက်မနည်းစေရ၊ နှင့် မြေပြင်ခံနိုင်ရည်မှာ 4 ohms ထက်နည်းသည်။
1.5 စက်ပစ္စည်းများ၏ ပုံမှန်လုပ်ငန်းဆောင်တာများကို သေချာစေရန်အတွက်၊ လေအရင်းအမြစ်၏ ဖိသိပ်ထားသောလေသည် လေအရင်းအမြစ်၏လိုအပ်ချက်များနှင့် မကိုက်ညီပါက၊ လေအရင်းအမြစ်သန့်စင်သည့်ကိရိယာအစုံ (dehumidification၊ degreasing၊ filtering) ကို မပြုလုပ်မီ ထည့်သွင်းသင့်သည်။ စက်၏လေဝင်ပေါက်။
၁.၆။စက်ပစ္စည်းများကို တိုက်ရိုက်နေရောင်ခြည်၊ တုန်ခါမှုနှင့် အပူရှိန်အရင်းအမြစ်များနှင့် ဝေးဝေးတွင် ထားသင့်ပြီး ကြိမ်နှုန်းမြင့်သည့် ဂျင်နရေတာများ၊ လျှပ်စစ်ဂဟေဆော်စက်များ စသည်တို့နှင့် ဝေးဝေးတွင် ထားသင့်သည်၊ သို့မှသာ စက်ထုတ်လုပ်မှု ချို့ယွင်းမှု သို့မဟုတ် စက်တိကျမှု ဆုံးရှုံးမှုကို ရှောင်ရှားသင့်သည်။
ဝန်ဆောင်မှုမတိုင်မီနှင့်အပြီး
1) လုပ်ငန်းမစမီ
ဖောက်သည်များထံမှ တောင်းဆိုချက်နှင့် လိုအပ်သော အချက်အလက်များကို လေ့လာပြီးနောက် ကျွန်ုပ်တို့၏ အင်ဂျင်နီယာများထံ တုံ့ပြန်ချက်မှတစ်ဆင့်၊ Bossman Technical team သည် သုံးစွဲသူများနှင့် နည်းပညာပိုင်းဆိုင်ရာ ဆက်သွယ်မှုနှင့် ဖြေရှင်းချက်ပုံစံများကို ပုံဖော်ပေးကာ သင့်လျော်သော machining solution နှင့် သင့်လျော်သော စက်များကို ရွေးချယ်ရာတွင် ဖောက်သည်အား ကူညီဆောင်ရွက်ပေးပါသည်။
2) ဝန်ဆောင်မှုအပြီး
A. တစ်နှစ်အာမခံဖြင့် စက်ကို တစ်သက်တာ ပြုပြင်ထိန်းသိမ်းမှုအတွက် ပေးဆောင်ရသည်။
B. စက်သို့ဦးတည်ရာဆိပ်ကမ်းသို့ရောက်ရှိပြီးနောက်တစ်နှစ်အာမခံကာလအတွင်း BOSSMAN သည် စက်ရှိလူလုပ်မဟုတ်သောချို့ယွင်းချက်အမျိုးမျိုးအတွက် အခမဲ့နှင့် အချိန်နှင့်တစ်ပြေးညီ ပြုပြင်ထိန်းသိမ်းမှုဝန်ဆောင်မှုများကို ဆောင်ရွက်ပေးမည်ဖြစ်ပြီး လူလုပ်မဟုတ်သောပျက်စီးမှုအစိတ်အပိုင်းများကို အချိန်နှင့်တစ်ပြေးညီ အစားထိုးလဲလှယ်ပေးမည်ဖြစ်ပါသည်။ အခကြေးငွေအာမခံကာလအတွင်း ပျက်ကွက်မှုများ ဖြစ်ပေါ်ပါက သင့်လျော်သော အခကြေးငွေဖြင့် ပြုပြင်ရမည်။
C.Technical ပံ့ပိုးမှု 24 နာရီအွန်လိုင်းတွင် TM, Skype, E-mail, ဆွေမျိုးမေးခွန်းများကိုအချိန်မီဖြေရှင်း။မဖြေရှင်းနိုင်ပါက BOSSMAN သည် ပြုပြင်ရန်အတွက် ဆိုက်ဆိုက်မြိုက်မြိုက်ရောက်ရှိလာရန် အရောင်းအပြီး အင်ဂျင်နီယာအား ချက်ချင်းစီစဉ်ပေးမည်ဖြစ်ပြီး ဝယ်ယူသူသည် VISA ၊ လေယာဉ်လက်မှတ်များနှင့် နေရာထိုင်ခင်းအတွက် ပေးဆောင်ရန် လိုအပ်ပါသည်။
ဖောက်သည်၏ဆိုက်