






BOSM - Horizontal Counter Drilling and Boring Machine
1. စက်ပစ္စည်းအသုံးပြုမှု-
BOSM အလျားလိုက် ကောင်တာတူးဖော်ခြင်းနှင့် ငြီးငွေ့ဖွယ်စက်သည် တာဝါတိုင်ကရိန်းထုပ်များကို လုပ်ဆောင်ရန်အတွက် သင့်ကုမ္ပဏီအတွက် အထူးစက်တစ်ခုဖြစ်သည်။ စက်တွင် ထိရောက်သော လေဖြတ်ခြင်းအကွာအဝေးအတွင်း တူးဖော်ခြင်း၊ ကြိတ်ခြင်းနှင့် ငြီးငွေ့ဖွယ်ကောင်းသော တူးဖော်ခြင်းတို့ကို သိရှိနိုင်စေမည့် အလျားလိုက်တူးဖော်ခြင်းနှင့် ငြီးငွေ့ဖွယ်ပါဝါခေါင်း ၂ စုံတို့ တပ်ဆင်ထားပါသည်။ ဖြတ်တောက်ခြင်း နှင့် အခြားသော စီမံဆောင်ရွက်ခြင်း၊ စက်ပစ္စည်း တည်နေရာပြခြင်း မြန်နှုန်းသည် မြန်ဆန်သည်၊ လုပ်ငန်းစဉ် တိကျမှု မြင့်မားပြီး စီမံဆောင်ရွက်မှု ထိရောက်မှု မြင့်မားသည်။
2. စက်ပစ္စည်းဖွဲ့စည်းပုံသွင်ပြင်လက္ခဏာများ-
2. 1. ၏အဓိကအစိတ်အပိုင်းများစက်
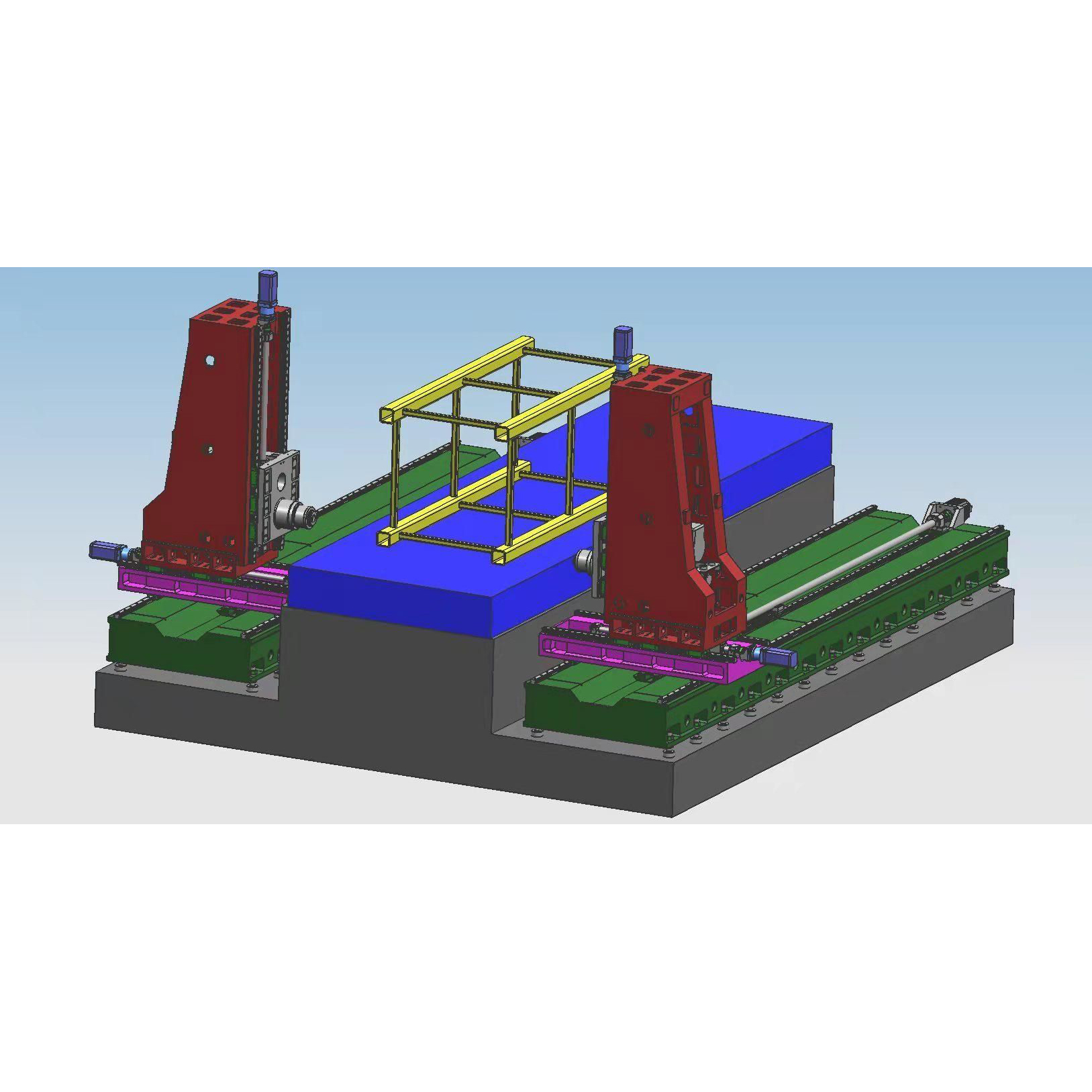
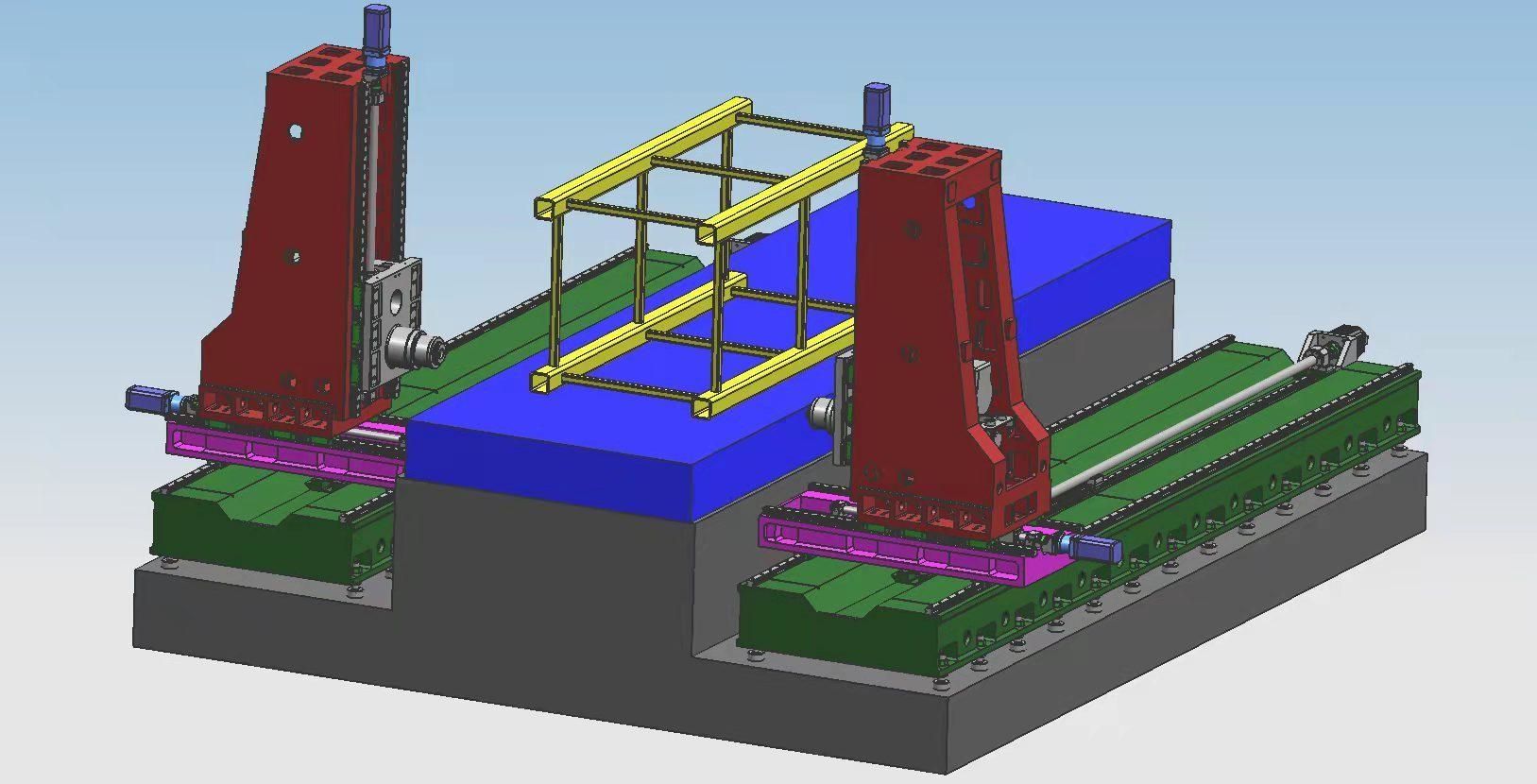
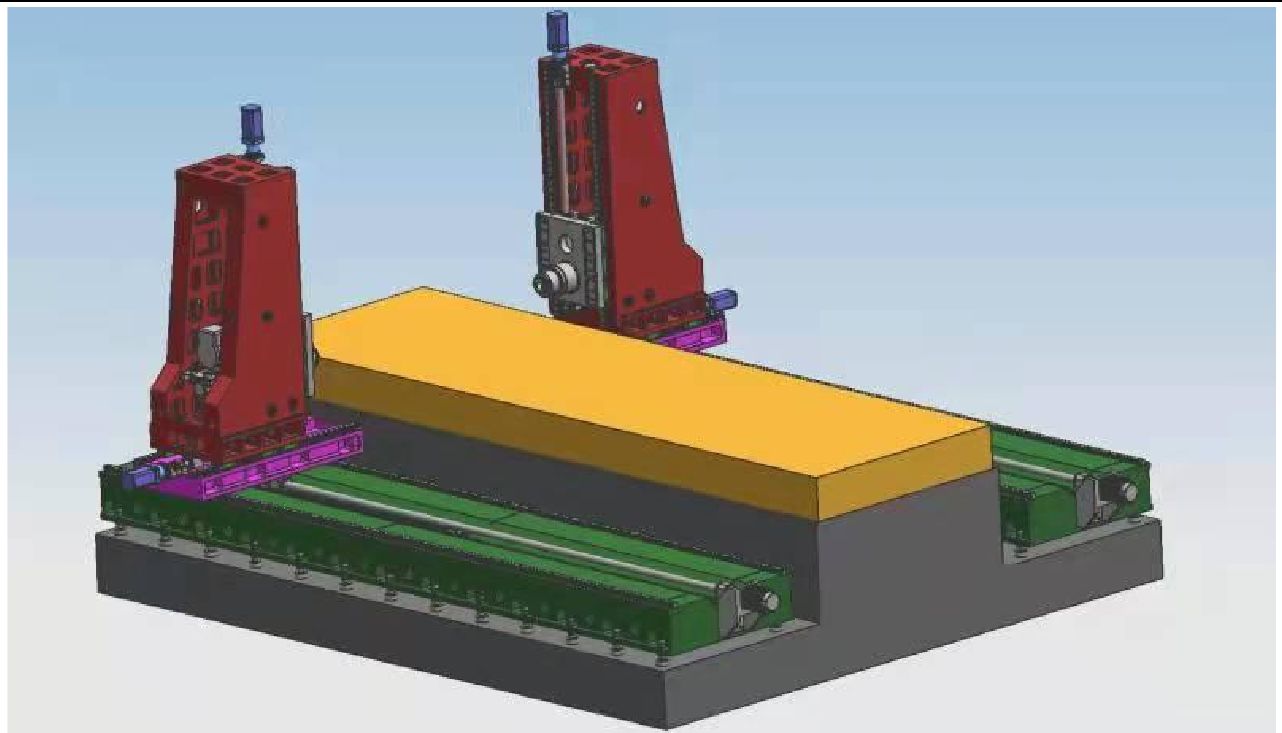
စက်၏အဓိကအစိတ်အပိုင်းများ- အိပ်ရာ၊ အလုပ်စားပွဲ၊ ဘယ်ညာကော်လံများ၊ ကုန်းနှီးများ၊ သိုးထီးစသည်ဖြင့်၊ ကြီးမားသောအစိတ်အပိုင်းများကို သစ်စေးသဲပုံသွင်းခြင်း၊ အရည်အသွေးမြင့် မီးခိုးရောင်သံ 250 သွန်းလုပ်ခြင်း၊ ပူပြင်းသောသဲတွင်းတွင် မြှုပ်နှံထားသည် → တုန်ခါမှုအိုမင်းခြင်း → ပူသည် မီးဖိုအတွင်း ပွတ်တိုက်ခြင်း → တုန်ခါမှု အိုမင်းခြင်း → ကြမ်းတမ်းသော ပြုပြင်ခြင်း → တုန်ခါမှု အိုမင်းခြင်း → မီးဖိုအတွင်း ပွတ်တိုက်ခြင်း → တုန်ခါမှု အိုမင်းခြင်း → အစိတ်အပိုင်းများ၏ အနုတ်လက္ခဏာဖိစီးမှုကို အပြီးသတ်ဖယ်ရှားပြီး အစိတ်အပိုင်းများ၏ စွမ်းဆောင်ရည်ကို တည်ငြိမ်စေသည်။ စက်ပစ္စည်းများ၏ workbench သည် fixed ဖြစ်ပြီး၊ နှစ်ဖက်စလုံးရှိ power heads များသည် base ၏ ရှေ့နှင့် နောက် directions များတွင် ရွေ့လျားနိုင်သည်။ စက်တွင် တူးဖော်ခြင်း၊ ငြီးငွေ့ခြင်း၊ တန်ပြန်စုပ်ခြင်း၊ ပုတ်ခြင်းစသည့် လုပ်ဆောင်ချက်များ ပါရှိသည်။ ကိရိယာ၏ အအေးခံနည်းလမ်းမှာ အတွင်းပိုင်းအအေးခံခြင်းနှင့် ပြင်ပအအေးခံခြင်း စသည်တို့ဖြစ်သည်။ စက်တွင် ဖိဒ်ပုဆိန် ၅ ခု၊ ဖြတ်တောက်သည့် ပါဝါခေါင်း ၂ ခုပါရှိသည်၊ ၎င်းသည် တစ်ချိန်တည်းတွင် ပုဆိန် ၅ ခုနှင့် တစ်ပြိုင်နက်တည်း လုပ်ဆောင်နိုင်သည် သို့မဟုတ် တစ်ခုတည်းလုပ်ဆောင်နိုင်သည်။ စက်၏ axial direction နှင့် power head ကို အောက်ပါပုံတွင် ပြထားသည်။
2. 2 axial ဂီယာ feed ကို၏အဓိကဖွဲ့စည်းပုံမှာအပိုင်း
2.2.1 X ဝင်ရိုး- ပါဝါခေါင်းသည် အောက်ခံလမ်းပြရထားလမ်းတစ်လျှောက် ဘေးတိုက် အပြန်အလှန်သက်ရောက်သည်။
X1-axis drive- AC servo motor နှင့် high-precision planetary reducer ကို X-axis ၏ linear motion ကိုနားလည်ရန် ball screw drive မှတဆင့် power head အား မောင်းနှင်ရန်အတွက် အသုံးပြုပါသည်။
X2-axis ဂီယာ- AC servo motor နှင့် high-precision planetary reducer ကို X-axis linear ရွေ့လျားမှုကို သိရှိနိုင်ရန် ball screw transmission မှတဆင့် power head အား မောင်းနှင်ရန်အတွက် အသုံးပြုပါသည်။
လမ်းညွှန်ရထားလမ်းပုံစံ- ခိုင်ခံ့မြင့်မားသော တိကျသောမျဉ်းဖြောင့်လမ်းညွှန်ရထားလမ်းနှစ်ခုကို ကျယ်ပြန့်သောအခြေခံပေါ်တွင် ကြွေပြားခင်းထားသည်။
2.2 Y1 ဝင်ရိုး- ပါဝါခေါင်းသည် ကော်လံပေါ်တွင် အပေါ်နှင့်အောက် အပြန်အလှန် တုံ့ပြန်သည်။
Y1-ဝင်ရိုးဒရိုက်ဗ်- Y1-ဝင်ရိုး၏မျဉ်းကြောင်းရွေ့လျားမှုကိုသိရှိနိုင်ရန် ဘောလုံးဝက်အူမှတစ်ဆင့် မောင်းနှင်ရန် AC ဆာဗာမော်တာကို အသုံးပြုပါ။ လမ်းညွှန်ရထားလမ်းပုံစံ- 45 အမျိုးအစား linear guide rails 4 ခု။
2.2.3 Y2 ဝင်ရိုး- ပါဝါခေါင်းသည် ကော်လံပေါ်တွင် အပေါ်နှင့်အောက် အပြန်အလှန် တုံ့ပြန်သည်။
Y2-ဝင်ရိုး ဂီယာ- Y1-ဝင်ရိုး၏ မျဉ်းကြောင်းရွေ့လျားမှုကို သိရှိရန် ဘောလုံးဝက်အူမှတဆင့် မောင်းနှင်ရန် AC ဆာဗာမော်တာကို အသုံးပြုသည်။
လမ်းညွှန်ရထားလမ်းပုံစံ- 45 အမျိုးအစား linear guide rails 4 ခု။
2.2.4 Z1 ဝင်ရိုး- ပါဝါခေါင်းသည် ကုန်းနှီးပေါ်တွင် အပြန်ပြန်အလှန်လှန် တုံ့ပြန်သည်။
Z1-ဝင်ရိုး ဂီယာ- Z1-ဝင်ရိုး၏ မျဉ်းကြောင်းရွေ့လျားမှုကို နားလည်ရန် ဘောလုံးအား ဝက်အူမှတစ်ဆင့် ရွေ့လျားမှုကို မောင်းနှင်ရန်အတွက် AC ဆာဗာမော်တာနှင့် တိကျမှုမြင့်မားသော ဂြိုဟ်သွားလျှော့ကိရိယာကို အသုံးပြုပါသည်။
2.2.5 Z2 ဝင်ရိုး- ပါဝါခေါင်းသည် ကုန်းနှီးပေါ်တွင် အပြန်ပြန်အလှန်လှန် တုံ့ပြန်သည်။
Z2-ဝင်ရိုးဂီယာ- Z2-ဝင်ရိုးမျဉ်းကြောင်းရွေ့လျားမှုကိုနားလည်ရန်ဘောလုံးဝက်အူမှတဆင့်ရွေ့လျားမှုကိုမောင်းနှင်ရန် AC servo motor နှင့် တိကျမှုမြင့်မားသောဂြိုဟ်လျှော့ကိရိယာကိုအသုံးပြုသည်။
2.3. Chip ကို ဖယ်ရှားပြီး အအေးခံပါ။
အလုပ်ခုံအောက်တွင် နှစ်ဖက်စလုံးတွင် ကွင်းဆက်ပြားချပ်ပြား လိုက်ပို့ကိရိယာများ တပ်ဆင်ထားပြီး ယဉ်ကျေးသော ထုတ်လုပ်မှုကို နားလည်ရန် အဆုံးတွင် သံချစ်ပ်များကို ချစ်ပ်သယ်ယူသူထံ စွန့်ထုတ်နိုင်သည်။ စက်၏စွမ်းဆောင်ရည်နှင့် ဝန်ဆောင်မှုသက်တမ်းကိုသေချာစေရန်အတွက် စက်တွင်းအအေးခံခြင်း + ပြင်ပအအေးခံခြင်းအတွက် အသုံးပြုနိုင်သည့် chip conveyor ၏ coolant tank တွင် cooling pump တစ်ခုရှိပြီး coolant ကို ပြန်လည်အသုံးပြုနိုင်ပါသည်။
3. ဒစ်ဂျစ်တယ် ဂဏန်းထိန်းချုပ်မှုစနစ် အပြည့်အစုံ-
၃.၁။ chip breaking function ဖြင့်၊ chip breaking time နှင့် chip breaking cycle ကို man-machine interface တွင် သတ်မှတ်နိုင်ပါသည်။
၃.၂။ tool lifting function ဖြင့် tool lifting distance ကို man-machine interface တွင် သတ်မှတ်နိုင်သည်။ အကွာအဝေးသို့ရောက်ရှိသောအခါ၊ ကိရိယာကို လျင်မြန်စွာ ရုတ်သိမ်းပေးမည်ဖြစ်ပြီး၊ ထို့နောက် ချစ်ပ်များကို စွန့်ပစ်လိုက်မည်ဖြစ်ပြီး၊ ထို့နောက် တူးဖော်သည့်မျက်နှာပြင်သို့ အမြန်ရောက်ရှိကာ အလုပ်အဖြစ် အလိုအလျောက် ပြောင်းလဲသွားမည်ဖြစ်သည်။
၃.၂။ Centralized operation control box နှင့် handheld unit သည် ဂဏန်းထိန်းချုပ်မှုစနစ်ကို ခံယူပြီး USB interface နှင့် LCD liquid crystal display တပ်ဆင်ထားပါသည်။ ပရိုဂရမ်ရေးဆွဲခြင်း၊ သိမ်းဆည်းခြင်း၊ ပြသခြင်းနှင့် ဆက်သွယ်ရေးကို လွယ်ကူချောမွေ့စေရန်အတွက်၊ လည်ပတ်မှု အင်တာဖေ့စ်တွင် လူ-စက် ဆွေးနွေးမှု၊ အမှားအယွင်း လျော်ကြေးပေးခြင်းနှင့် အလိုအလျောက် အချက်ပေးစနစ်တို့ကဲ့သို့သော လုပ်ဆောင်ချက်များ ပါရှိသည်။
3.2. စက်ပစ္စည်းများသည် မလုပ်ဆောင်မီ အပေါက်အနေအထားကို ကြည့်ရှုစစ်ဆေးခြင်းနှင့် ပြန်လည်စစ်ဆေးခြင်း လုပ်ဆောင်ချက်ပါရှိပြီး လည်ပတ်မှုမှာ အလွန်အဆင်ပြေပါသည်။
4. အလိုအလျောက်ချောဆီ
စက်တိကျသော linear လမ်းညွှန်ရထားတွဲများ၊ တိကျသောဘောလုံးဝက်အူအတွဲများနှင့် အခြားတိကျမှုမြင့်မားသောရွေ့လျားမှုအတွဲများကို အလိုအလျောက်ချောဆီစနစ်များတပ်ဆင်ထားပါသည်။ အလိုအလျောက်ချောဆီပန့်သည် ဖိအားဆီထုတ်ပေးပြီး ပမာဏရှိသော ချောဆီခန်းသည် ဆီထဲသို့ဝင်လာသည်။ ဆီခန်းတွင် ဆီများပြည့်နေပြီး စနစ်ဖိအား 1.4~1.75Mpa သို့ တက်လာသောအခါ၊ စနစ်အတွင်းရှိ ဖိအားခလုတ်ကို ပိတ်လိုက်သည်၊ ပန့်သည် ရပ်သွားကာ unloading valve ကို တစ်ချိန်တည်းတွင် unloaded လုပ်ပါသည်။ လမ်းရှိ ဆီဖိအား 0.2Mpa အောက်တွင် ကျဆင်းသွားသောအခါ၊ ပမာဏရှိသော ချောဆီသည် ချောဆီပွိုင့်ကို စတင်ဖြည့်သွင်းပြီး ဆီဖြည့်ခြင်းတစ်ခု ပြီးမြောက်ပါသည်။ ပမာဏဆီပေးသူမှ တိကျသောဆီပမာဏနှင့် စနစ်ဖိအားကို ထောက်လှမ်းနိုင်သောကြောင့် ဆီထောက်ပံ့မှုသည် ယုံကြည်စိတ်ချရပြီး kinematic အတွဲတစ်ခုစီ၏ မျက်နှာပြင်ပေါ်တွင် ဆီဖလင်တစ်ချပ်ရှိကြောင်း သေချာစေပြီး၊ ပွတ်တိုက်မှုနှင့် ဟောင်းနွမ်းမှုတို့ကို လျော့နည်းစေပြီး ပျက်စီးမှုကို ကာကွယ်ပေးသည်။ အပူလွန်ကဲခြင်းကြောင့် ဖြစ်ပေါ်လာသော အတွင်းပိုင်းဖွဲ့စည်းပုံသို့။ စက်၏တိကျမှုနှင့်အသက်တာသေချာစေရန်။
5. စက်ပတ်ဝန်းကျင်ကို အသုံးပြုပါ
ပါဝါထောက်ပံ့မှု- သုံးဆင့် AC380V±10%, 50Hz±1 ပတ်ဝန်းကျင်အပူချိန်- -10°~45°
6. လက်ခံမှုစံနှုန်းများ-
JB/T10051-1999 "သတ္တုဖြတ်စက်များ၏ ဟိုက်ဒရောလစ်စနစ်အတွက် ယေဘူယျနည်းပညာဆိုင်ရာသတ်မှတ်ချက်များ"
7. နည်းပညာဆိုင်ရာ ကန့်သတ်ချက်များ:
| မော်ဒယ် | 2050-5Z | |
| အမြင့်ဆုံးလုပ်ဆောင်နေသော အလုပ်ခွင်အရွယ်အစား | အလျား × အနံ × အမြင့် (မီလီမီတာ) | 5000×2000×1500 |
| အလုပ်စားပွဲအရွယ်အစား | အလျား X အနံ (မီလီမီတာ) | 5000*2000 |
| ပါဝါဦးခေါင်း အခြေခံ ဦးတည်ချက် ခရီး | အပြန်ပြန်အလှန်လှန် (mm) | ၅၀၀၀ |
| ပါဝါခေါင်းအတက်အဆင်း | သိုးထီး၏ အပေါ်နှင့်အောက် လေဖြတ်ခြင်း (mm) | ၁၅၀၀ |
|
Horizontal ram type drilling power head Power head 1 ၂ | အရေအတွက် (၂ ချပ်) | ၂ |
| ဗိုင်းလိပ်တံသွယ် | BT50 | |
| တူးဖော်ခြင်းအချင်း (မီလီမီတာ) | Φ2-Φ60 | |
| အချင်း (မီလီမီတာ) | M3-M30 | |
| Spindle အမြန်နှုန်း (r/min) | 30~3000 | |
| ဆာဗိုဗိုင်းလိပ်တံမော်တာ ပါဝါ (kw) | ၂၂*၂ | |
| ဘယ်ညာ ခရီးသွားခြင်း (မီလီမီတာ) | ၆၀၀ | |
| Bidirectional Positioning တိကျမှု | 300mm*300mm | ±0.025 |
| Bi-directional ထပ်တလဲလဲ နေရာချထားမှု တိကျမှု | 300mm*300mm | ±0.02 |





