BOSM -5020-5Z ဆန့်ကျင်ဘက်-ခေါင်းငြီးငွေ့ဖွယ်ကြိတ်စက်
1.စက်ပစ္စည်းအသုံးပြုမှု-
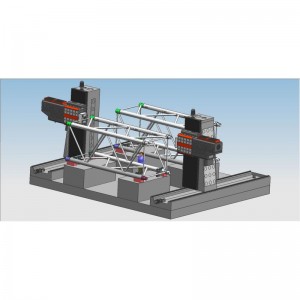
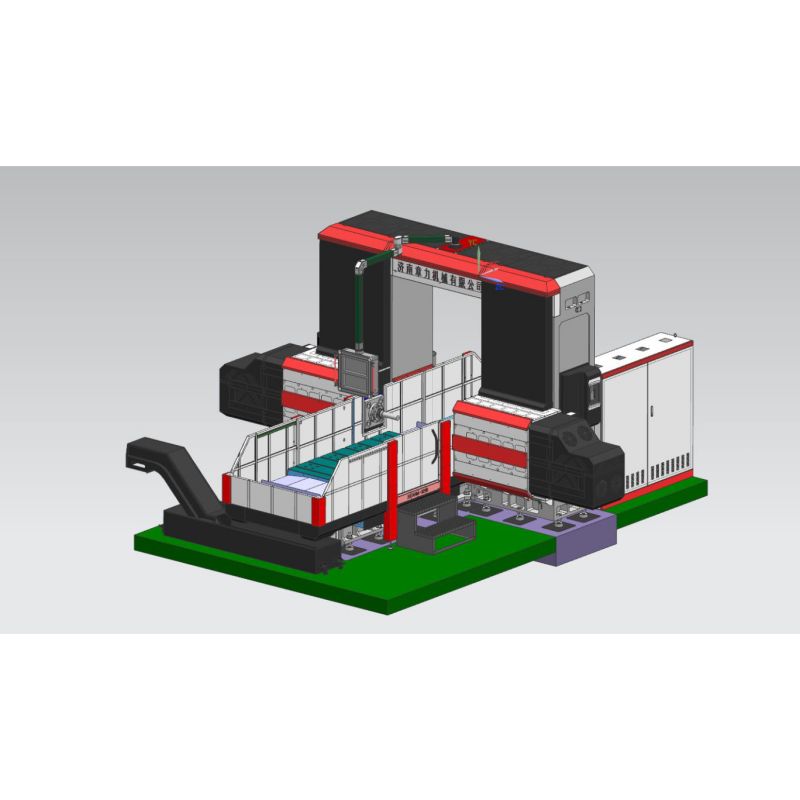
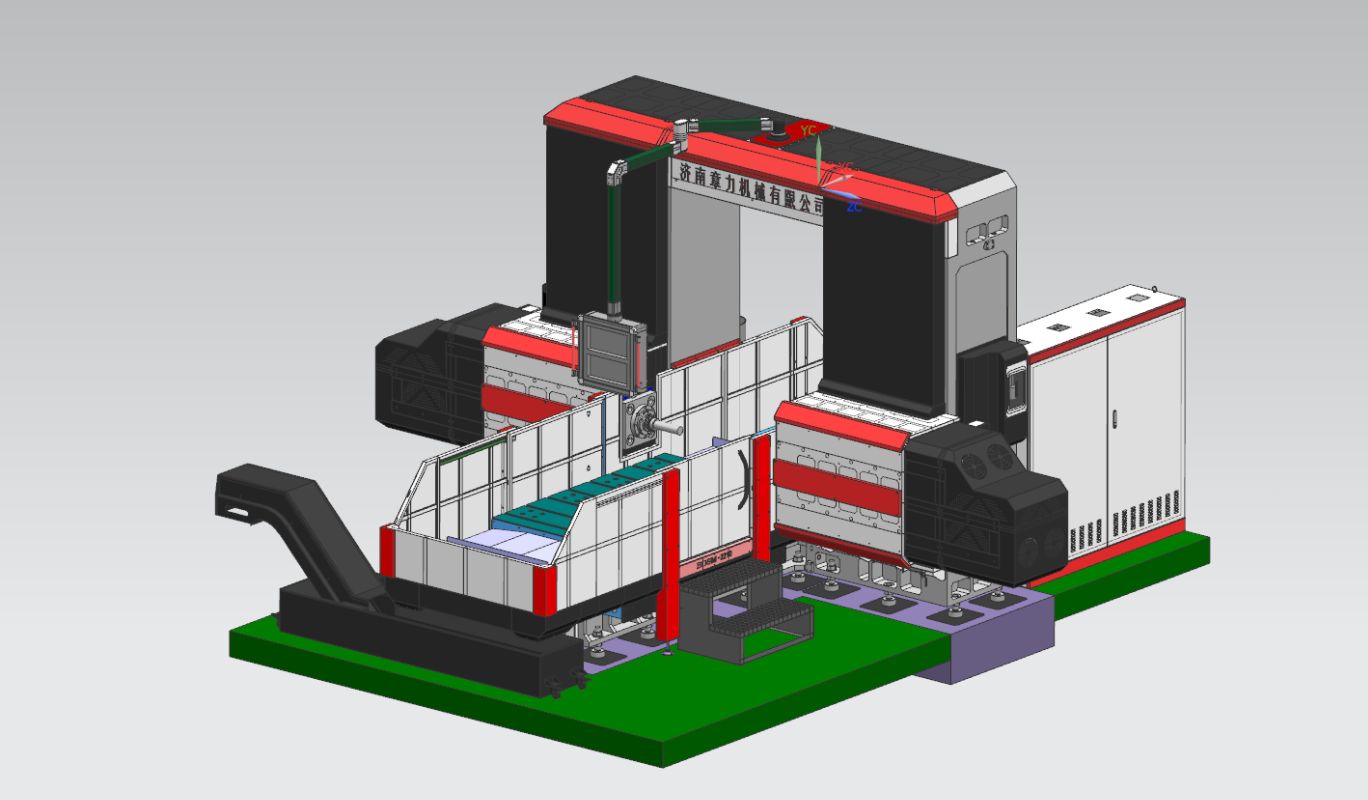
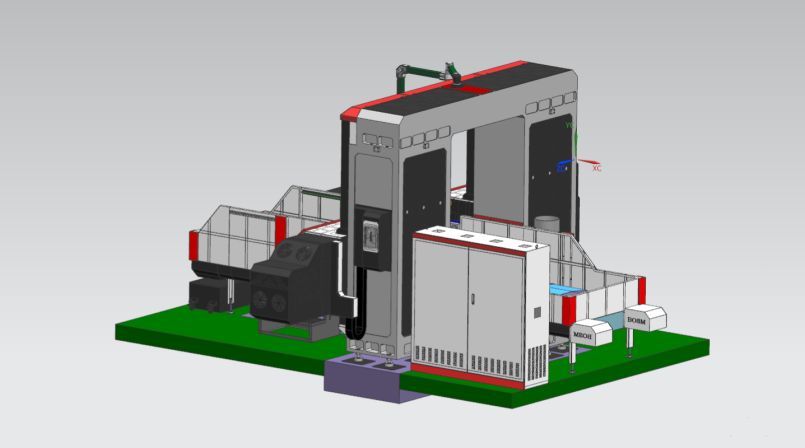
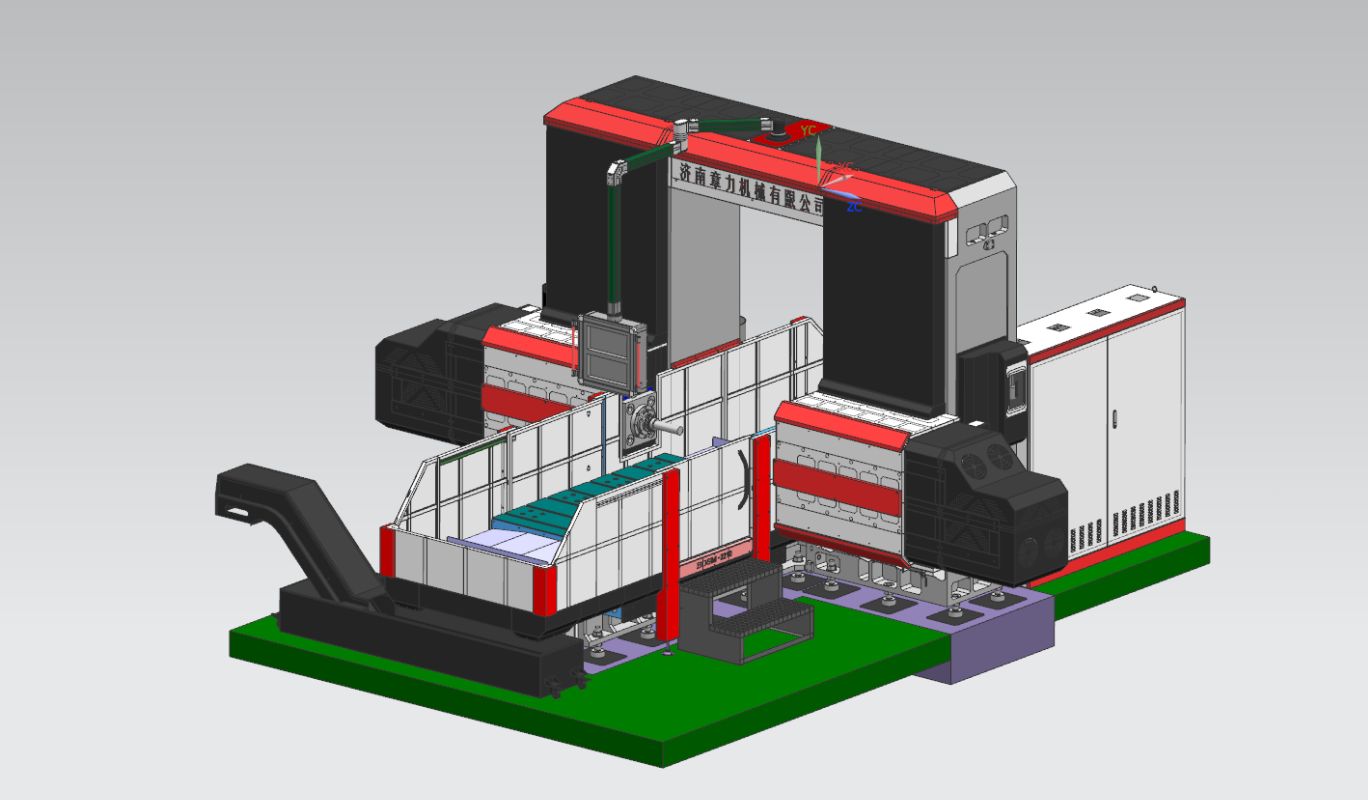
BOSM-5020-5Z CNC workbench မိုဘိုင်း double-column head-to-head boring and milling machine သည် engineering machinery symmetrical workpieces များအတွက် အထူးစက်တစ်ခုဖြစ်သည်။စက်တွင် ထိရောက်သော လေဖြတ်ခြင်းအကွာအဝေးအတွင်း တူးဖော်ခြင်း၊ ကြိတ်ခွဲခြင်း၊ ငြီးငွေ့ဖွယ်ကောင်းသော အခြားလုပ်ငန်းဆောင်တာများကို သိရှိနိုင်စေမည့် အထူးရွေ့လျားနိုင်သော အလုပ်ခုံတန်းလျားနှစ်ခုနှင့် အလျားလိုက် သိုးထီးနှစ်စုံကို တပ်ဆင်ထားပြီး၊ ထိရောက်သော လေဖြတ်ခြင်းအကွာအဝေးအတွင်း workpiece ကို တစ်ကြိမ်တည်း လုပ်ဆောင်နိုင်သည် (မလိုအပ်ပါ။ Secondary Clamping)၊ လျင်မြန်သော loading and unloading speed၊ fast positioning speed, high processing accuracy and high processing efficiency.
၂.စက်ပစ္စည်းဖွဲ့စည်းပုံ-
2.1. စက်၏အဓိကအစိတ်အပိုင်းများ
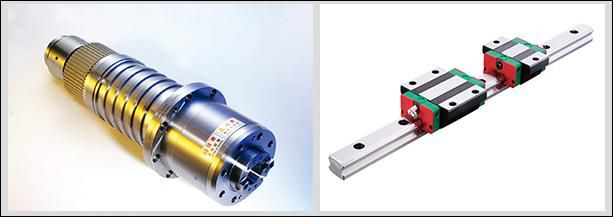
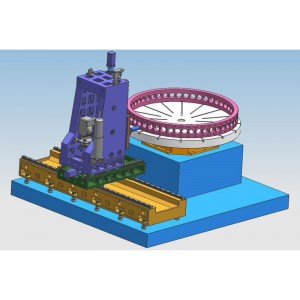
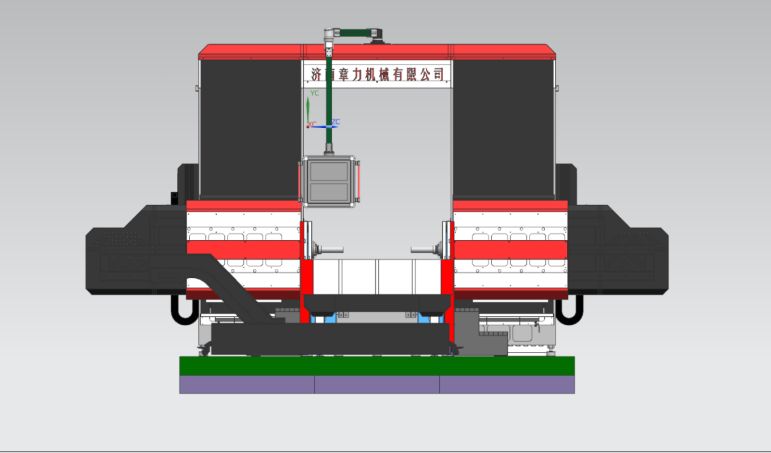
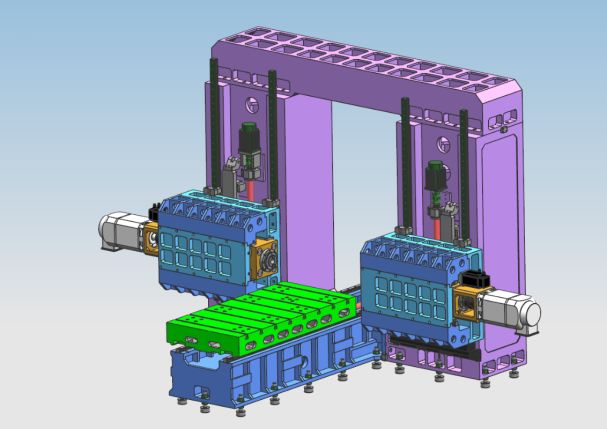
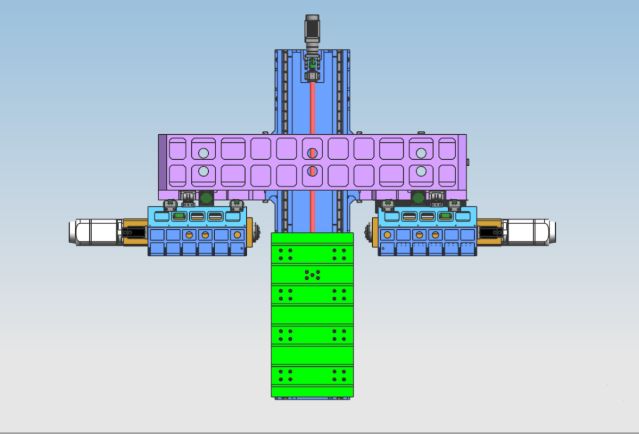
အိပ်ရာ၊ အလုပ်ခုံတန်းများ၊ ဘယ်ညာကော်လံများ၊ ထုပ်တန်းများ၊ ဂရန်ထရီချိတ်တန်းများ၊ ကုန်းနှီးများ၊ သိုးထီးစသည်ဖြင့် အားလုံးသည် သစ်စေးသဲပုံသွင်းခြင်း၊ အရည်အသွေးမြင့် မီးခိုးရောင်သံ 250 သွန်းလုပ်ခြင်း၊ ပူပြင်းသောသဲတွင်းတွင် မြှုပ်နှံထားသော → တုန်ခါမှုအိုမင်းခြင်း → မီးဖိုထဲတွင် နှိမ့်ချခြင်း → တုန်ခါမှု အိုမင်းခြင်း → ကြမ်းတမ်းသော ပြုပြင်ခြင်း → တုန်ခါမှု အိုမင်းခြင်း → မီးဖိုအတွင်း ပွတ်တိုက်ခြင်း → တုန်ခါမှု အိုမင်းခြင်း → ပြီးဆုံးခြင်း၊ အစိတ်အပိုင်းများ၏ အနုတ်လက္ခဏာဖိစီးမှုကို လုံးဝဖယ်ရှားပေးပြီး အစိတ်အပိုင်းများ၏ စွမ်းဆောင်ရည်ကို တည်ငြိမ်စေသည်။ပုံသေအိပ်ရာ၊ ဘယ်ညာ ကော်လံများ၊ ဂန္တဝင်ခန်းနှင့် အလုပ်ခုံတန်းများ ရွေ့လျားခြင်း၊စက်တွင် ကြိတ်ခွဲခြင်း၊ ငြီးငွေ့ဖွယ်ဖြတ်တောက်ခြင်း၊ တူးဖော်ခြင်း၊ တန်ပြန်စုပ်ခြင်း၊ ပုတ်ခြင်းနှင့် အခြားလုပ်ဆောင်ချက်များပါရှိသည်၊ ကိရိယာအအေးပေးသည့်နည်းလမ်းမှာ ပြင်ပအအေးခံခြင်း၊ စက်တွင် ဝင်ရိုး 4 ခုချိတ်ဆက်ခြင်း၊ 5 ဝင်ရိုးတစ်ခုတည်းလုပ်ဆောင်ချက်၊ ပါဝါခေါင်း 2 ခုပါရှိသည်၊ စက် axial နှင့် power head ကို အောက်ပါပုံတွင် ပြထားသည်။
2.2. axial ဂီယာ feed ကိုအပိုင်း၏အဓိကဖွဲ့စည်းပုံ
၂.၂.၁။X-axis- အလုပ်စားပွဲသည် ပုံသေခုတင်၏ လမ်းညွှန်ရထားလမ်းတစ်လျှောက် ဘေးတိုက် အပြန်အလှန် တုံ့ပြန်သည်။
X-axis ဂီယာ- AC servo motor နှင့် high-precision planetary reducer ကို ball screw transmission မှတဆင့် worktable ကို မောင်းနှင်ရန်အတွက် X-axis linear motion ကို သိရှိနိုင်စေရန် အသုံးပြုပါသည်။
လမ်းညွှန်ရထားလမ်းပုံစံ- ခိုင်ခံ့မြင့်မားသော တိကျသောမျဉ်းကြောင်းလမ်းညွှန်သံလမ်းနှစ်ခုကို တင်ပါ။
2.2.2.Y1 ဝင်ရိုး- ပါဝါခေါင်းနှင့် ဘောင်ကို ကော်လံ၏ ရှေ့ဘက်ခြမ်းတွင် ဒေါင်လိုက်တပ်ဆင်ထားပြီး ကော်လံ၏ လမ်းညွှန်ရထားလမ်းတစ်လျှောက် ဘယ်နှင့်ညာ အပြန်အလှန်ပြုလုပ်ထားသည်။
Y1-ဝင်ရိုးဂီယာ- ကုန်းနှီးရွေ့လျားရန် မောင်းနှင်ရန်နှင့် Y1-ဝင်ရိုးမျဉ်းကြောင်းရွေ့လျားမှုကို နားလည်ရန် ဘောလုံးဝက်အူကို မောင်းနှင်ရန်အတွက် AC ဆာဗာမော်တာအား အသုံးပြုသည်။
လမ်းညွှန်ရထားလမ်းပုံစံ- 45 အမျိုးအစား linear guide rails 4 ခု။
2.2.3.Y2 ဝင်ရိုး- ပါဝါခေါင်း၏ ဒုတိယဘောင်ကို ကော်လံ၏ ရှေ့ဘက်ခြမ်းတွင် ဒေါင်လိုက်တပ်ဆင်ထားပြီး ကော်လံ၏ လမ်းညွှန်ရထားလမ်းတစ်လျှောက် ဘယ်နှင့်ညာ အပြန်အလှန် တုံ့ပြန်သည်။
Y2-ဝင်ရိုး ဂီယာ- Y1-ဝင်ရိုး၏ မျဉ်းကြောင်းရွေ့လျားမှုကို သိရှိရန် ကုန်းနှီးလှုပ်ရှားမှုကို မောင်းနှင်ရန်အတွက် ဘောလုံးဝက်အူကို မောင်းနှင်ရန်အတွက် AC ဆာဗာမော်တာအား အသုံးပြုသည်။
လမ်းညွှန်ရထားလမ်းပုံစံ- 45 အမျိုးအစား linear guide rails 4 ခု


၂.၂.၄။Z1 ဝင်ရိုး- ပါဝါခေါင်းလျှောကုန်းနှီးကို ညာဘက်ကော်လံ၏အရှေ့ဘက်ခြမ်းတွင် ဒေါင်လိုက်တပ်ဆင်ထားပြီး ကော်လံလမ်းညွှန်ရထားလမ်းတစ်လျှောက် အပေါ်နှင့်အောက် အပြန်အလှန်လုပ်ဆောင်သည်။
Z1-ဝင်ရိုးဂီယာ- Z1-ဝင်ရိုးမျဉ်းကြောင်းရွေ့လျားမှုကိုနားလည်ရန်ဘောလုံးဝက်အူမှတဆင့်ရွေ့လျားရန် ram ကိုမောင်းနှင်ရန်အတွက် AC servo motor နှင့် high-precision planetary reducer ကိုအသုံးပြုပါသည်။
လမ်းညွှန်ရထားလမ်းပုံစံ- 2 65 အမျိုးအစား linear guide rails
2.2.5.Z2 ဝင်ရိုး- ပါဝါခေါင်းဆလိုက် ကုန်းနှီးကို ညာဘက်ကော်လံ၏ ရှေ့ဘက်ခြမ်းတွင် ဒေါင်လိုက်တပ်ဆင်ထားပြီး ကော်လံလမ်းညွှန်ရထားလမ်းတစ်လျှောက် အပေါ်နှင့်အောက် အပြန်အလှန် တုံ့ပြန်သည်။
Z1-ဝင်ရိုးဂီယာ- Z2-ဝင်ရိုးမျဉ်းကြောင်းရွေ့လျားမှုကိုနားလည်ရန်ဘောလုံးဝက်အူမှတဆင့်ရွေ့လျားရန် ram ကိုမောင်းနှင်ရန်အတွက် AC servo motor နှင့် တိကျသောမြင့်မားသောဂြိုလ်လျှော့ကိရိယာကိုအသုံးပြုသည်။
လမ်းညွှန်ရထားလမ်းပုံစံ- 2 65 အမျိုးအစား linear guide rails

အရည်အသွေးမြင့် HT250 ကာက်စ်ကော်လံ 65 အမျိုးအစား အကြီးစား လိုင်းယာလမ်းညွှန်သံလမ်း ၂ ခု
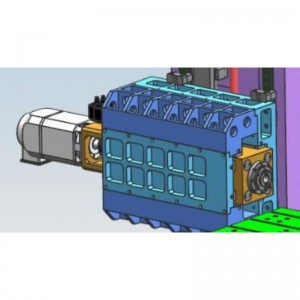
ငြီးငွေ့ဖွယ်နှင့် ကြိတ်ခွဲသည့် ပါဝါခေါင်း (ပါဝါခေါင်း 1 နှင့် 2 အပါအဝင်) သည် ဒြပ်ပေါင်းစတုရန်း ram တစ်ခုဖြစ်ပြီး ရွေ့လျားသည့် ဦးတည်ရာကို မျဉ်းလိုက် ရိုလာသံလမ်း 4 ခုဖြင့် လမ်းညွှန်ထားသည်။တိကျသောဘောလုံးဝက်အူအတွဲကို မောင်းနှင်ရန်အတွက် drive သည် AC ဆာဗာမော်တာကိုအသုံးပြုသည်။စက်တွင် နိုက်ထရိုဂျင်ချိန်ခွင်လျှာ ဘားတစ်ခု တပ်ဆင်ထားသည်။ဝက်အူနှင့် ဆာဗာမော်တာပေါ်ရှိ စက်ဦးခေါင်း၏ ထမ်းနိုင်စွမ်းရည်ကို လျှော့ချပါ။Z-axis မော်တာတွင် အလိုအလျောက် ဘရိတ်လုပ်ဆောင်ချက် ပါရှိသည်။ပါဝါချို့ယွင်းသောအခါတွင်၊ အလိုအလျောက်ဘရိတ်သည် လည်ပတ်မရနိုင်စေရန် မော်တာရိုးတံကို တင်းတင်းကြပ်ကြပ်ဆုပ်ကိုင်ထားမည်ဖြစ်သည်။အလုပ်လုပ်သောအခါ၊ သတ္တုပြားသည် workpiece ကိုမထိသောအခါ၊ လျင်မြန်စွာ အစာကျွေးလိမ့်မည်။စပီကာတုံးသည် workpiece ကိုထိသောအခါ၊ ၎င်းသည် အလုပ်လုပ်သည့် feed သို့ အလိုအလျောက်ပြောင်းသွားမည်ဖြစ်သည်။စပီကာတုံးသည် workpiece သို့ ထိုးဖောက်ဝင်ရောက်သောအခါ၊ ၎င်းသည် အမြန်ပြန်ရစ်ခြင်းသို့ အလိုအလျောက်ပြောင်းသွားမည်ဖြစ်သည်။စပီကာ၏အဆုံးသည် workpiece မှထွက်ခွာပြီး သတ်မှတ်အနေအထားသို့ရောက်ရှိသောအခါ၊ ၎င်းသည် အလိုအလျောက်လည်ပတ်မှုကို သိရှိရန် နောက်အပေါက်အနေအထားသို့ ရွှေ့သွားမည်ဖြစ်သည်။၎င်းသည် မျက်မမြင်အပေါက်တူးဖော်ခြင်း၊ ကြိတ်ခွဲခြင်း၊ ချမ်ဖာခြင်း၊ ချစ်ပ်ကွဲခြင်း၊ အလိုအလျောက် ချစ်ပ်ဖယ်ရှားခြင်းစသည်ဖြင့် လုပ်သားကုန်ထုတ်စွမ်းအားကို တိုးတက်စေသည့် လုပ်ဆောင်ချက်များကို သိရှိနိုင်သည်။


500mm stroke compound square ram power head သည် square ram ၏ မာကျောမှုကို ထိန်းသိမ်းထားစဉ် လမ်းညွန်တိကျမှုကို များစွာတိုးတက်ကောင်းမွန်စေရန် သမားရိုးကျထည့်သွင်းမှုများအစား linear guides ကိုအသုံးပြုသည်။
2.3. Chip ကို ဖယ်ရှားပြီး အအေးခံပါ။
အလုပ်ခုံအောက်တွင် နှစ်ဖက်စလုံးတွင် ခရုပတ်နှင့် ပြားချပ်ချပ်ချပ်ချပ်ပြား တပ်ဆင်ထားသော ချစ်ပ်များကို ယဉ်ကျေးသောထုတ်လုပ်မှုကို နားလည်ရန် ခရုပတ်နှင့် ကွင်းဆက်ပြားများ အဆင့်နှစ်ဆင့်ဖြင့် အဆုံးတွင် ချစ်ပ်ပြားများကို အလိုအလျောက် ပို့ဆောင်ပေးနိုင်သည်။ကိရိယာ၏ စွမ်းဆောင်ရည်နှင့် ဝန်ဆောင်မှုသက်တမ်းကို သေချာစေရန်အတွက် ကိရိယာ၏ ပြင်ပအအေးခံရန်အတွက် အသုံးပြုနိုင်သည့် အအေးခံကန်အတွင်းရှိ အအေးခံပန့်တစ်ခုရှိပြီး coolant ကို ပြန်လည်အသုံးပြုနိုင်သည်။

3.ဒစ်ဂျစ်တယ် ဂဏန်းထိန်းချုပ်မှုစနစ် အပြည့်အစုံ-
၃.၁။chip breaking function ဖြင့်၊ chip breaking time နှင့် chip breaking cycle ကို man-machine interface တွင် သတ်မှတ်နိုင်ပါသည်။
၃.၂။tool lifting function ပါ၀င်ပြီး tool lifting distance ကို man-machine interface တွင် သတ်မှတ်နိုင်ပါသည်။အကွာအဝေးသို့ရောက်သောအခါ၊ ကိရိယာကို လျင်မြန်စွာ ရုတ်သိမ်းလိုက်ပြီး၊ ချစ်ပ်များကို စွန့်ပစ်ပြီးနောက် ၎င်းကို တူးဖော်သည့်မျက်နှာပြင်သို့ အမြန်ပို့ဆောင်ကာ အလုပ်အဖြစ် အလိုအလျောက် ပြောင်းလဲသွားပါသည်။
၃.၃။Centralized operation control box နှင့် hand-held unit သည် ဂဏန်းထိန်းချုပ်မှုစနစ်ကို ခံယူပြီး USB interface နှင့် LCD အရည် crystal display တပ်ဆင်ထားပါသည်။ပရိုဂရမ်ရေးဆွဲခြင်း၊ သိမ်းဆည်းခြင်း၊ ပြသခြင်းနှင့် ဆက်သွယ်ရေးကို လွယ်ကူချောမွေ့စေရန်အတွက်၊ လည်ပတ်မှု အင်တာဖေ့စ်တွင် လူ-စက် ဆွေးနွေးမှု၊ အမှားအယွင်း လျော်ကြေးပေးခြင်းနှင့် အလိုအလျောက် အချက်ပေးစနစ်တို့ကဲ့သို့သော လုပ်ဆောင်ချက်များ ပါရှိသည်။
၃.၄။စက်ပစ္စည်းသည် မလုပ်ဆောင်မီ အပေါက်အနေအထားကို ကြည့်ရှုစစ်ဆေးခြင်းနှင့် ပြန်လည်စစ်ဆေးခြင်း၏ လုပ်ဆောင်ချက်ပါရှိပြီး လုပ်ဆောင်ချက်သည် အလွန်အဆင်ပြေပါသည်။
4.အလိုအလျောက်ချောဆီ
စက်တိကျသော linear လမ်းညွှန်ရထားတွဲများ၊ တိကျသောဘောလုံးဝက်အူအတွဲများနှင့် အခြားတိကျမှုမြင့်မားသောရွေ့လျားမှုအတွဲများကို အလိုအလျောက်ချောဆီစနစ်များတပ်ဆင်ထားပါသည်။အလိုအလျောက်ချောဆီပန့်သည် ဖိအားဆီထုတ်ပေးပြီး ပမာဏရှိသော ချောဆီခန်းသည် ဆီထဲသို့ဝင်လာသည်။ဆီခန်းကို ဆီဖြည့်ပြီးနောက်၊ စနစ်ဖိအား 1.4-1.75Mpa သို့ တက်လာသောအခါ၊ စနစ်အတွင်းရှိ ဖိအားခလုတ်ကို ပိတ်လိုက်၊ ပန့်သည် ရပ်သွားကာ တစ်ချိန်တည်းတွင် တင်ဆောင်သည့် အဆို့ရှင်ကို ဖြုတ်ပစ်လိုက်သည်။လမ်းရှိ ဆီဖိအား 0.2Mpa အောက်တွင် ကျဆင်းသွားသောအခါ၊ ပမာဏရှိသော ချောဆီသည် ချောဆီပွိုင့်ကို စတင်ဖြည့်သွင်းပြီး ဆီဖြည့်ခြင်းတစ်ခု ပြီးမြောက်ပါသည်။အရေအတွက်ဆီ injector ၏ တိကျသောဆီထောက်ပံ့မှုနှင့် စနစ်ဖိအားကို သိရှိနိုင်သောကြောင့် ဆီထောက်ပံ့မှုသည် ယုံကြည်စိတ်ချရပြီး kinematic အတွဲတစ်ခုစီ၏ မျက်နှာပြင်ပေါ်တွင် ဆီဖလင်တစ်ချပ်ရှိကြောင်း သေချာစေရန်၊ ပွတ်တိုက်မှုနှင့် ဟောင်းနွမ်းမှုတို့ကို လျှော့ချပေးပြီး ပျက်စီးမှုကို ကာကွယ်ပေးသည်။ အပူလွန်ကဲခြင်းကြောင့် ဖြစ်ပေါ်လာသော အတွင်းပိုင်းဖွဲ့စည်းပုံ။စက်၏တိကျမှုနှင့်အသက်တာသေချာစေရန်။လျှောလမ်းပြရထားတွဲနှင့် နှိုင်းယှဉ်ပါက ဤစက်တွင်အသုံးပြုသည့် rolling linear guide rail pair သည် အားသာချက်များစွာရှိပါသည်။
① ရွေ့လျားမှု အာရုံခံနိုင်စွမ်း မြင့်မားသည်၊ rolling guide rail ၏ ပွတ်တိုက်မှု ကိန်းဂဏန်းသည် သေးငယ်သည်၊ 0.0025~0.01 သာရှိပြီး သာမန် စက်ယန္တရား၏ 1/10 နှင့် ညီမျှသော မောင်းနှင်အား အလွန်လျော့သွားသည်။
② ရွေ့လျားမှုနှင့် တည်ငြိမ်သော ပွတ်တိုက်မှုကြား ကွာခြားချက်မှာ အလွန်သေးငယ်ပြီး နောက်ဆက်တွဲ စွမ်းဆောင်ရည်မှာ ကောင်းမွန်သည်၊ ဆိုလိုသည်မှာ၊ မောင်းနှင်မှု အချက်ပြမှုနှင့် စက်ပိုင်းဆိုင်ရာ လုပ်ဆောင်မှုကြားကာလသည် အလွန်တိုတောင်းသည်၊ ၎င်းသည် တုံ့ပြန်မှုအမြန်နှုန်းနှင့် အာရုံခံနိုင်စွမ်းကို ပိုမိုကောင်းမွန်စေပါသည်။ ဂဏန်းထိန်းချုပ်မှုစနစ်။
③ ၎င်းသည် မြန်နှုန်းမြင့် မျဉ်းသားရွေ့လျားမှုအတွက် သင့်လျော်ပြီး ၎င်း၏ ချက်ချင်းအမြန်နှုန်းသည် လျှောလမ်းညွှန်သံလမ်းများထက် 10 ဆခန့် ပိုမိုမြင့်မားသည်။
④ ၎င်းသည် ကွက်လပ်မရှိသော လှုပ်ရှားမှုကို သိရှိနိုင်ပြီး စက်ပိုင်းဆိုင်ရာ စနစ်၏ ရွေ့လျားမှု တောင့်တင်းမှုကို တိုးတက်စေသည်။
⑤ ပရော်ဖက်ရှင်နယ် ထုတ်လုပ်သူများမှ ထုတ်လုပ်ထားသောကြောင့် တိကျမှု၊ ဘက်စုံကောင်းမွန်ပြီး ထိန်းသိမ်းရလွယ်ကူသည်။
5.ဝင်ရိုးသုံးလေဆာစစ်ဆေးခြင်း-
Bosman ၏ စက်တစ်ခုစီအား United Kingdom ရှိ RENISHAW ကုမ္ပဏီ၏ လေဆာ interferometer ဖြင့် ချိန်ညှိထားပြီး pitch error၊ backlash၊ positioning accuracy၊ repeating positioning accuracy စသည်တို့ကို တိကျစွာစစ်ဆေးပြီး pitch error ၊ backlash ၊ positioning accuracy ၊ repeated positioning accuracy စသည်တို့ကို ချိန်ညှိထားသည်။ စက်Ballbar စစ်ဆေးခြင်း စက်တစ်ခုစီသည် စက်ဝိုင်းတိကျမှု နှင့် စက်၏ ဂျီဩမေတြီ တိကျမှုကို ချိန်ညှိရန် ဗြိတိသျှ RENISHAW ကုမ္ပဏီမှ ဘော်လ်ဘားကို အသုံးပြုကာ စက်၏ 3D စက်၏ တိကျမှုနှင့် စက်ဝိုင်းတိကျမှုကို သေချာစေရန် စက်ဝိုင်းပုံဖြတ်ခြင်း စမ်းသပ်မှုများကို တစ်ချိန်တည်းတွင် ပြုလုပ်သည်။


6.စက်အသုံးပြုမှုပတ်ဝန်းကျင်-
၆.၁။စက်ပစ္စည်းအသုံးပြုမှု ပတ်ဝန်းကျင် လိုအပ်ချက်
ပတ်ဝန်းကျင် အပူချိန်ကို အဆက်မပြတ် ထိန်းသိမ်းခြင်းသည် တိကျစွာ စက်ပစ္စည်းအတွက် မရှိမဖြစ် အရေးကြီးသော အချက်ဖြစ်သည်။
(၁) ရရှိနိုင်သော ပတ်ဝန်းကျင် အပူချိန် လိုအပ်ချက်မှာ -10°C မှ 35°C ဖြစ်ပြီး ပတ်ဝန်းကျင် အပူချိန် 20°C တွင် စိုထိုင်းဆ 40% မှ 75% ဖြစ်သင့်ပါသည်။
(2) သတ်မှတ်ထားသော အကွာအဝေးအတွင်း စက်၏တည်ငြိမ်တိကျမှုကို ထိန်းသိမ်းရန်အတွက်၊ အကောင်းဆုံးပတ်ဝန်းကျင်အပူချိန်သည် 15°C မှ 25°C ဖြစ်ရန် လိုအပ်ပြီး အပူချိန်ကွာခြားချက် ±2°C/24h ထက်မကျော်လွန်စေရပါ။
၆.၂။ပါဝါထောက်ပံ့မှုဗို့အား- 3 အဆင့်၊ 380V၊ ±10% ဗို့အားအတက်အကျအကွာအဝေးအတွင်း၊ ပါဝါထောက်ပံ့မှုအကြိမ်ရေ- 50HZ။
၆.၃။အသုံးပြုသည့်နေရာတွင် ဗို့အားမတည်ငြိမ်ပါက စက်၏ပုံမှန်လည်ပတ်မှုကိုသေချာစေရန်အတွက် စက်အား တည်ငြိမ်သောပါဝါထောက်ပံ့မှုတစ်ခုတပ်ဆင်ထားသင့်သည်။
၆.၄။စက်တွင် ယုံကြည်စိတ်ချရသော မြေပြင်ရှိသင့်သည်- မြေစိုက်ဝါယာကြိုးသည် ကြေးနီဝါယာကြိုးဖြစ်ပြီး ဝါယာအချင်းသည် 10mm² ထက် မနည်းသင့်ဘဲ မြေစိုက်ခံနိုင်ရည်မှာ 4 ohms ထက်နည်းသင့်သည်။
၆.၅။စက်ပစ္စည်းများ၏ ပုံမှန်လုပ်ငန်းဆောင်တာများကို သေချာစေရန်အတွက်၊ လေအရင်းအမြစ်၏ ဖိသိပ်ထားသောလေသည် လေအရင်းအမြစ်၏ လိုအပ်ချက်များနှင့် မကိုက်ညီပါက၊ လေဝင်လေထွက်သန့်စင်ခြင်းကိရိယာ (dehumidification၊ degreasing၊ filtering) အစုံကို လေမဝင်မီတွင် ထည့်သွင်းသင့်သည်။ စက်၏
၆.၆။စက်ပစ္စည်းများကို တိုက်ရိုက်နေရောင်ခြည်၊ တုန်ခါမှုနှင့် အပူအရင်းအမြစ်များ၊ ကြိမ်နှုန်းမြင့်ဂျင်နရေတာများ၊ လျှပ်စစ်ဂဟေဆော်စက်များ စသည်တို့နှင့် ဝေးဝေးတွင်ထားပါ။ စက်၏ထုတ်လုပ်မှုချို့ယွင်းမှု သို့မဟုတ် စက်တိကျမှုဆုံးရှုံးခြင်းတို့ကို ရှောင်ရှားပါ။
7.နည်းပညာဆိုင်ရာ ကန့်သတ်ချက်များ-
| မော်ဒယ် | 5020-5Z | |
| အမြင့်ဆုံးလုပ်ဆောင်နေသော အလုပ်ခွင်အရွယ်အစား | အလျား × အနံ × အမြင့် (မီလီမီတာ) | 5000×2000×2500 |
| Gantry အများဆုံး feed | အနံ (မီလီမီတာ) | ၂၃၀၀ |
| အလုပ်စားပွဲအရွယ်အစား | အလျား X အနံ (မီလီမီတာ) | 5000*2000 |
| စားပွဲတင်ခရီး | အလုပ်ခုံသည် အနောက်သို့ ရွေ့လျားနေသည် (မီလီမီတာ) | ၅၀၀၀ |
| သိုးထီးနှစ်ထပ်ကို အပေါ်နှင့်အောက် မြှောက်ပါ။ | သိုးထီး၏ အပေါ်နှင့်အောက် လေဖြတ်ခြင်း (mm) | ၂၅၀၀ |
| Horizontal ram type drilling head power head one two | အရေအတွက် (၂)၊ | ၂ |
| Horizontal ram type drilling head power head one two | ဗိုင်းလိပ်တံသွယ် | BT50 |
| Spindle အမြန်နှုန်း (r/min) | 30~5000 | |
| ဆာဗိုဗိုင်းလိပ်တံမော်တာ ပါဝါ (kw) | ၃၇*၂ | |
| spindles နှစ်ခု၏ အလယ်ဗဟိုကြား အကွာအဝေး (mm) | 1500-2500mm | |
| သိုးထီးတစ်ကောင်၏ ဘယ်ညာ လေဖြတ်ခြင်း (မီလီမီတာ) | ၅၀၀ | |
| သိုးထီးနှစ်ထပ်၏ ဘယ်ညာ လေဖြတ်ခြင်း (mm) | ၁၀၀၀ | |
| Bidirectional Positioning တိကျမှု | 300mm*300mm | ±0.025 |
| Bi-directional ထပ်တလဲလဲ နေရာချထားမှု တိကျမှု | 300mm*300mm | ±0.02 |
| စုစုပေါင်းအလေးချိန် (t) | (၅၅) ခန့် | စုစုပေါင်းအလေးချိန် (t) |