BOSM -4Z2000 မြန်နှုန်းမြင့် CNC တူးဖော်ခြင်းနှင့် ကြိတ်စက်
1. စက်ပစ္စည်းအသုံးပြုမှု-
BOSM-1000 အလျားလိုက် CNC တူးဖော်ခြင်းနှင့် ကြိတ်စက်အား ဘက်စုံထိရောက်သော တူးဖော်ခြင်း၊ ကြိတ်ခွဲခြင်း၊ အသာပုတ်ခြင်းနှင့် ငြီးငွေ့ဖွယ်ကောင်းသော လုပ်ဆောင်ခြင်းအတွက် အဓိကအားဖြင့် အဆို့ရှင်များ၊ အဆို့ရှင်တုံးများ၊ အလျော့အတင်းများ၊ အနားကွပ်များ၊ discs၊ rings၊ slewing အထောက်အပံ့များနှင့် အထူ၏ထိရောက်သောအကွာအဝေးအတွင်း အခြား workpieces များ .တူးဖော်ခြင်း၊ ကြိတ်ခွဲခြင်း၊ ပုတ်ခြင်းနှင့် ငြီးငွေ့ခြင်းများကို တစ်ခုတည်းသော ပစ္စည်းအစိတ်အပိုင်းများနှင့် ပေါင်းစပ်ပစ္စည်းများပေါ်တွင် နားလည်နိုင်သည်။စက်၏ machining လုပ်ငန်းစဉ်ကို ဒစ်ဂျစ်တယ်စနစ်ဖြင့် ထိန်းချုပ်ထားပြီး လည်ပတ်မှုမှာ အလွန်အဆင်ပြေပါသည်။၎င်းသည် အလိုအလျောက်စနစ်၊ မြင့်မားသောတိကျမှု၊ အမျိုးအစားများစွာနှင့် အစုလိုက်အပြုံလိုက် ထုတ်လုပ်မှုကို သိရှိနိုင်သည်။
2. စက်ပစ္စည်းဖွဲ့စည်းပုံ-
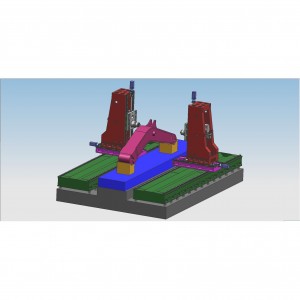
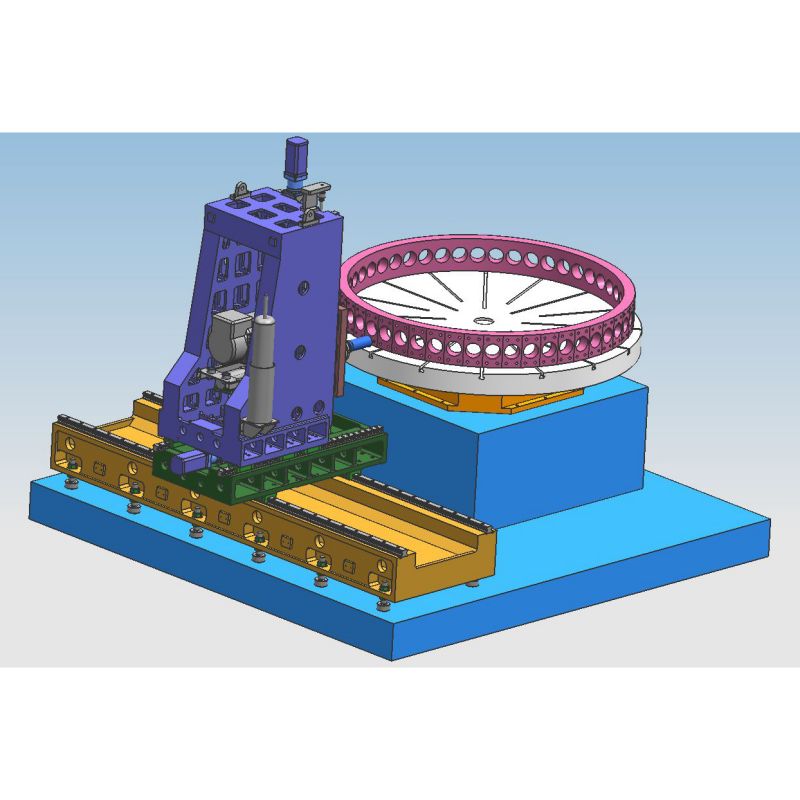
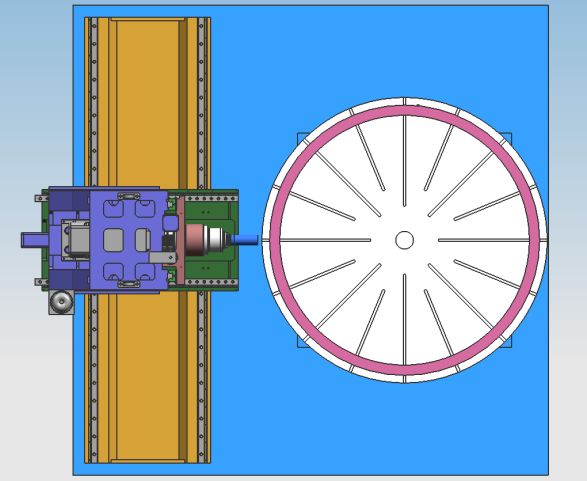
ဤစက်ပစ္စည်းသည် အဓိကအားဖြင့် အိပ်ရာ၊ CNC အညွှန်းကိန်း rotary စားပွဲ၊ ရွှေ့ပြောင်းနိုင်သောကော်လံ၊ ရွှေ့ပြောင်းနိုင်သောကုန်းနှီး၊ တူးဖော်နိုင်သော ကုန်းနှီးဓာတ်အားခေါင်း၊ အလိုအလျောက်ချောဆီစက်နှင့် အကာအကွယ်ကိရိယာ၊ လည်ပတ်နေသော အအေးပေးစက်၊ ဒစ်ဂျစ်တယ်ထိန်းချုပ်မှုစနစ်၊ ဟိုက်ဒရောလစ်စနစ်၊ လျှပ်စစ်စနစ်စသည်ဖြင့် ပါဝင်သည်။လှည့်ပတ်လမ်းညွန်ရထားလမ်းကို ပံ့ပိုးထားပြီး လမ်းညွှန်ထားပြီး တိကျသောဝက်အူကို မောင်းနှင်ထားသည်။စက်သည် မြင့်မားသော နေရာချထားမှု တိကျမှုနှင့် ထပ်ခါတလဲလဲ နေရာချထားမှု တိကျမှုရှိသည်။
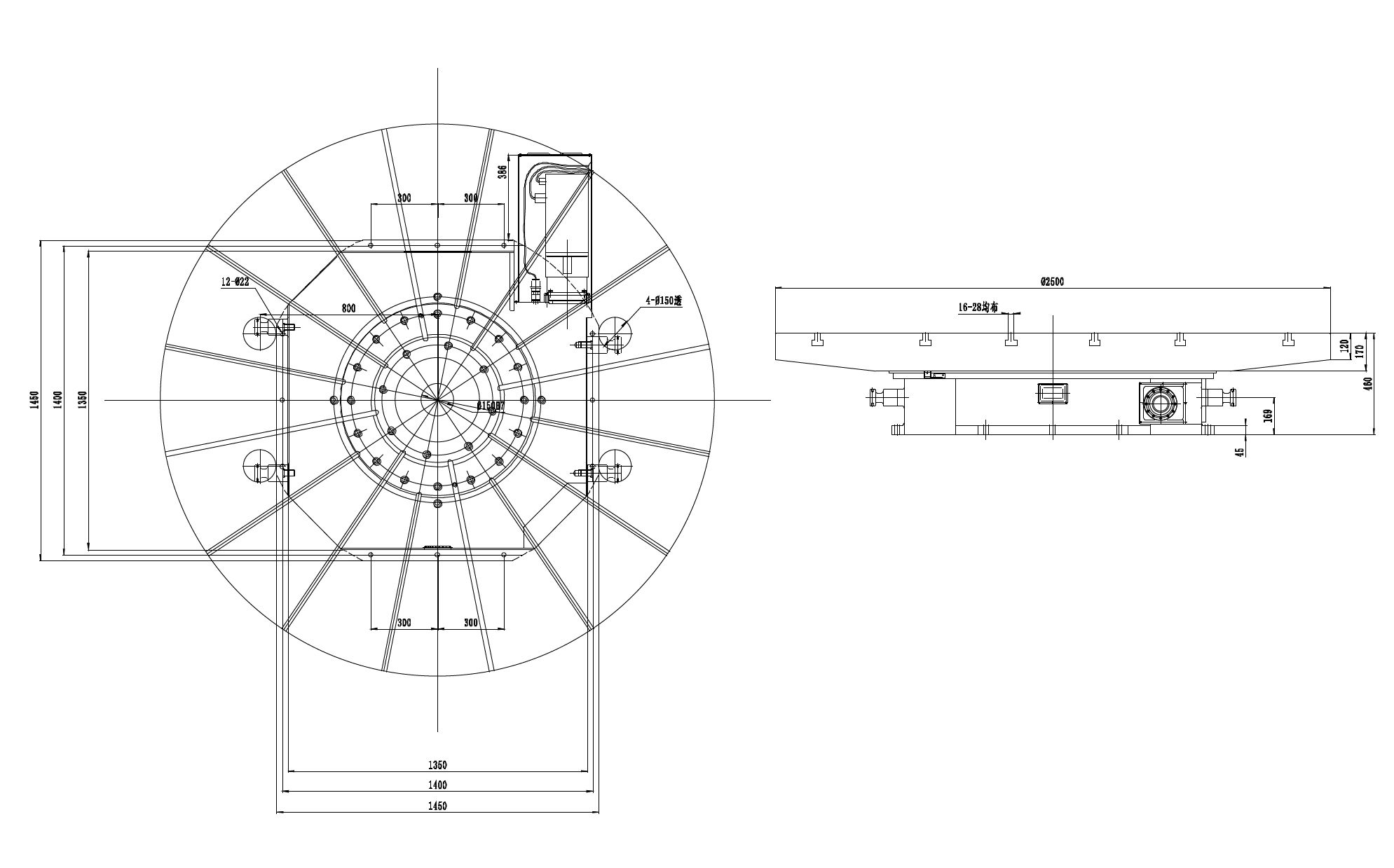
၂.၁။အိပ်ရာစားပွဲ- အိပ်ရာကို HT250 သံသွန်းတည်ဆောက်ပုံဆိုင်ရာ အစိတ်အပိုင်းများဖြင့် ပြုလုပ်ထားသည်။အတွင်းစိတ်ဖိစီးမှုကိုဖယ်ရှားရန် Secondary tempering ပြီးနောက် ၎င်းကို အပြီးသတ်သည်။၎င်းသည် ကောင်းမွန်သော ရွေ့လျားမှုနှင့် တည်ငြိမ် တောင့်တင်းမှုရှိပြီး ပုံပျက်ခြင်း မရှိပါ။တိကျသောဂဏန်းထိန်းချုပ်မှုညွှန်းကိန်းပန်းကန်ပြား၊ servo drive 360° မထင်မရှားအညွှန်းကိန်းနေရာချထားခြင်းနှင့် လေ/ ဟိုက်ဒရောလစ်လော့ခ်ချခြင်း၊ ဒရိုက်စနစ်သည် လှည့်ခြင်းရိုးရိုးအပိုင်းကို 360° အလိုအလျောက်ညွှန်းရန် AC servo မော်တာကိုအသုံးပြုကာ ညွှန်းကိန်းတိကျမှုသည် ဒီဂရီတစ်ထောင်၏တစ်ထောင်ဖြစ်သည်။အညွှန်းပန်းကန်ပြားကို ကုတင်၏ထိပ်တွင် ချထားပြီး ကုတင်အောက်ခြေတွင် ချိန်ညှိနိုင်သော ဘောလ်များကို ဖြန့်ခွဲထားကာ ကုတင်အလုပ်စားပွဲ၏ အဆင့်ကို အလွယ်တကူ ချိန်ညှိနိုင်သည်။
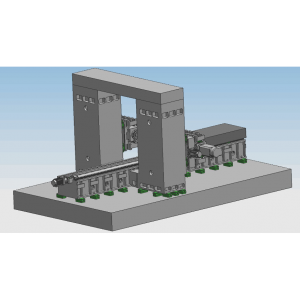
၂.၂။ရွေ့လျားနိုင်သောကော်လံ- အတွင်းပိုင်းဖိစီးမှုကိုဖယ်ရှားရန်အတွက် ရွေ့လျားနိုင်သောသွန်းသံဖွဲ့စည်းပုံကော်လံသည် အတွင်းပိုင်းဖိစီးမှုကိုဖယ်ရှားရန် ဒုတိယမြောက် အပူပေးသည့်ကုသမှုပြီးနောက် ပြီးဆုံးသည်။၎င်းသည် ကောင်းမွန်သော ရွေ့လျားမှုနှင့် တည်ငြိမ် တောင့်တင်းမှုရှိပြီး ပုံပျက်ခြင်း မရှိပါ။တိကျသောဘောလုံးဝက်အူအတွဲနှင့် ဆာဗာမော်တာတစ်ခုသည် ကော်လံဆလိုက်ကို Y-ဝင်ရိုးလမ်းကြောင်းအတိုင်း ရွေ့စေသည်။တိကျသောဘောလုံးဝက်အူအတွဲနှင့် ဆာဗာမော်တာတစ်ခုသည် ကော်လံဆလိုက်ကို X-ဝင်ရိုးလမ်းကြောင်းအတိုင်း ရွှေ့စေသည်။ယူနစ်ဆလိုက်ပေါ်တွင် တူးဖော်မှုယူနစ်ကို တပ်ဆင်ပါ။အချိတ်အဆက်မှတဆင့် servo motor မှ မောင်းနှင်သော ball screw ပေါ်ရှိ ball nut ၏ လှည့်ခြင်းဖြင့် ကော်လံ၏ရွေ့လျားမှုကို သိရှိနိုင်သည်။
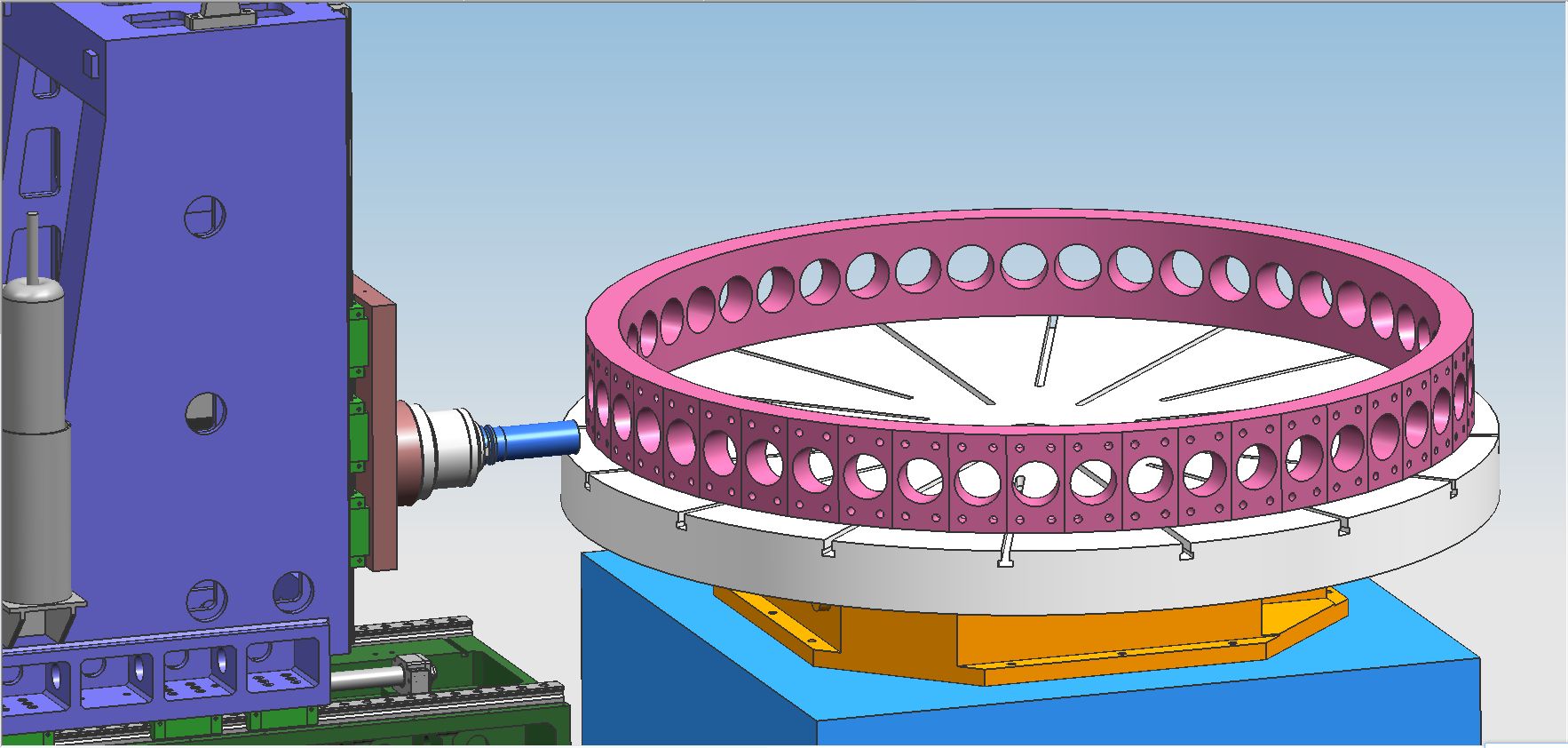
၂.၃။မိုဘိုင်းကုန်းနှီး- မိုဘိုင်းကုန်းနှီးတွင် အလွန်မြင့်မားသော သယ်ဆောင်နိုင်သော စွမ်းရည်မြင့် rolling linear guide rail pairs နှစ်ခု၊ တိကျသောဘောလုံးဝက်အူအတွဲနှင့် ဆာဗာမော်တာတစ်ခုတို့ တပ်ဆင်ထားပြီး၊ ၎င်းသည် တူးဖော်ခြင်းပါဝါဦးခေါင်းအား Z-axis ဦးတည်ရာသို့ ရွေ့လျားစေနိုင်သည်။ ပါဝါခေါင်းကို ရှေ့သို့ မြန်မြန်၊ ရှေ့သို့ ပြေးပါ၊ နောက်ပြန်ဆုတ်၊ ရပ်တန့်ခြင်း နှင့် အခြားလုပ်ဆောင်ချက်များကို သိရှိနားလည်ပါ။၎င်းတွင် အလိုအလျောက် ချစ်ပ်ကွဲခြင်း၊ ချစ်ပ်ဖယ်ရှားခြင်းနှင့် ခေတ္တရပ်ခြင်း စသည့် လုပ်ဆောင်ချက်များ ပါဝင်သည်။
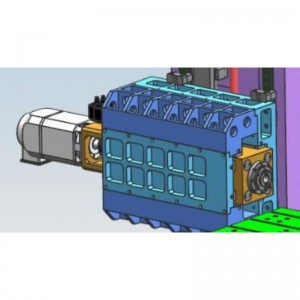
၂.၄။တူးဖော်ခြင်းပါဝါခေါင်း- တူးဖော်ခြင်းပါဝါဦးခေါင်းသည် ထိုင်ဝမ်စက်မှုဗိုင်းလိပ်တံကို လက်ခံထားပြီး အထူးတိကျသောဗိုင်းလိပ်တံသည် ပြင်းထန်သော synchronous belt ဂီယာမှတဆင့် ခြေလှမ်းမရှိသောအမြန်နှုန်းပြောင်းလဲမှုကို သိရှိနိုင်စေပါသည်။ဆာဗာမော်တာများနှင့် ဘောလုံးဝက်အူများဖြင့် မောင်းနှင်သည်။Y-axis သည် ချိတ်ဆက်နိုင်ပြီး semi-closed-loop ထိန်းချုပ်မှုကို လက်ခံနိုင်ပြီး linear နှင့် circular interpolation လုပ်ဆောင်ချက်များကို သိရှိနိုင်သည်။spindle end သည် BT50 taper hole ဖြစ်သည်။
၂.၅။အလိုအလျောက်ချောဆီစက်နှင့် အကာအကွယ်ကိရိယာ-
ဤစက်တွင် လမ်းညွှန်သံလမ်းများ၊ ခဲဝက်အူများနှင့် စင်များကဲ့သို့သော ရွေ့လျားနေသောအတွဲများကို အလိုအလျောက်ချောဆီပေးသည့် အလိုအလျောက်ချောဆီပေးသည့်ကိရိယာတစ်ခု တပ်ဆင်ထားပါသည်။စက်
Z-axis နှင့် Y-axis တွင် ဖုန်ဒဏ်ခံနိုင်သော အကာအကွယ်အဖုံးများ တပ်ဆင်ထားပြီး အလုပ်စားပွဲပတ်လည်တွင် ရေစိုခံ splash baffle များကို တပ်ဆင်ထားသည်။
၂.၆။ဒစ်ဂျစ်တယ် ဂဏန်းထိန်းချုပ်မှုစနစ် အပြည့်အစုံ-
၂.၆.၁။chip breaking function ဖြင့်၊ chip breaking time နှင့် chip breaking cycle ကို man-machine interface တွင် သတ်မှတ်နိုင်ပါသည်။
၂.၆.၂။tool lifting function ပါ၀င်ပြီး tool lifting height ကို man-machine interface တွင် သတ်မှတ်နိုင်ပါသည်။တူးဖော်ခြင်းသည် ဤအမြင့်သို့ရောက်သောအခါ၊ တူးသည့်ဘစ်ကို အလုပ်ခွင်၏ထိပ်သို့ လျင်မြန်စွာ ရုတ်သိမ်းလိုက်ပြီး၊ ထို့နောက် ချစ်ပ်များကို စွန့်ပစ်ပြီးနောက် တူးဖော်သည့်မျက်နှာပြင်သို့ အမြန်ပို့ကာ အလုပ်အဖြစ်သို့ အလိုအလျောက်ပြောင်းလဲသွားသည်။
၂.၆.၃။Centralized operation control box နှင့် hand-held unit သည် ဂဏန်းထိန်းချုပ်မှုစနစ်ကို ခံယူပြီး USB interface နှင့် LCD အရည် crystal display screen တို့ တပ်ဆင်ထားပါသည်။ပရိုဂရမ်ရေးဆွဲခြင်း၊ သိမ်းဆည်းခြင်း၊ ပြသခြင်းနှင့် ဆက်သွယ်ရေးကို လွယ်ကူချောမွေ့စေရန်အတွက်၊ လည်ပတ်မှု အင်တာဖေ့စ်တွင် လူ-စက် ဆွေးနွေးမှု၊ အမှားအယွင်း လျော်ကြေးပေးခြင်းနှင့် အလိုအလျောက် အချက်ပေးစနစ်တို့ကဲ့သို့သော လုပ်ဆောင်ချက်များ ပါရှိသည်။
၂.၆.၄။စက်ပစ္စည်းသည် မလုပ်ဆောင်မီ အပေါက်အနေအထားကို ကြည့်ရှုစစ်ဆေးခြင်းနှင့် ပြန်လည်စစ်ဆေးခြင်း လုပ်ဆောင်ချက်ပါရှိပြီး လည်ပတ်မှုမှာ အလွန်အဆင်ပြေပါသည်။
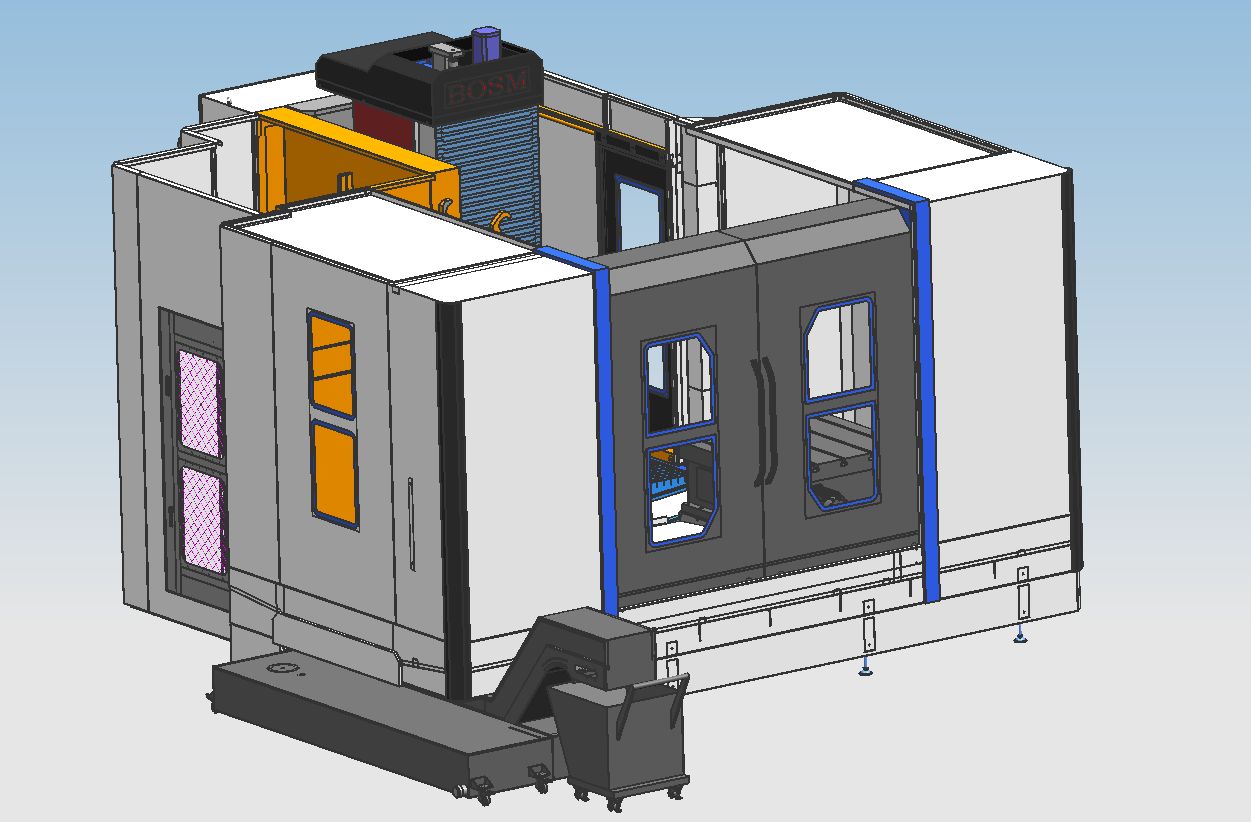
* ကြီးမားသောကွင်းများကို လွှင့်တင်ခြင်းနှင့် အစာကျွေးခြင်းအတွက် အဆင်ပြေစေရန်အတွက် စက်သည် ပြင်ပအကာအကွယ်မရှိသည့်အပြင် ပြင်ပအကာအကွယ်ကို စိတ်ကြိုက်ရွေးချယ်နိုင်သည်။
3. စက်ပတ်ဝန်းကျင်ကို အသုံးပြုပါ
ပါဝါထောက်ပံ့မှု- သုံးဆင့် AC380V±10%, 50Hz±1 ဝန်းကျင်အပူချိန်- 0°~45°
4.နည်းပညာဆိုင်ရာဘောင်များ
| မော်ဒယ် | BOSM-1000 | |
| အများဆုံးလုပ်ဆောင်ခြင်း။ workpiece အရွယ်အစား | ခွင့်ပြုနိုင်သော အများဆုံးလည်ပတ်မှုအချင်း (မီလီမီတာ) | ≤Φ2000 |
|
အလုပ်စားပွဲ | အလုပ်စားပွဲ အတိုင်းအတာ (မီလီမီတာ) စတုရန်းပုံ | □ ၁၀၀၀ |
| အလုပ်စားပွဲ၏အတိုင်းအတာ (မီလီမီတာ) အဝိုင်း | Φ1200 | |
| အလျားလိုက် အများဆုံးဝန် (ကီလိုဂရမ်) | ၅၀၀၀ | |
|
ဒေါင်လိုက် ရမ်တူးယူနစ် | ပမာဏ) | 1 |
| ဗိုင်းလိပ်တံသွယ် | BT50 | |
| တူးဖော်ခြင်းအချင်း (မီလီမီတာ) | ၂-၁၂၀ | |
| ကြိတ်ခွဲစက် အချင်း (မီလီမီတာ) | ၂၀၀ | |
| အချင်း (မီလီမီတာ) | M6-M36 | |
| ဗိုင်းလိပ်တံအဆုံးမျက်နှာမှ စားပွဲအလယ်သို့ အကွာအဝေး (mm) | ၁၀၀၀-၁၆၀၀ | |
| ဗိုင်းလိပ်တံဗဟိုမှ ဇယား၏အပေါ်ဘက်လေယာဉ်သို့ အကွာအဝေး (mm) | 100-1100 | |
| Spindle အမြန်နှုန်း (r/min) | ၃၀-၃၀၀၀ | |
| Spindle motor ပါဝါ (kw) | 30 | |
| အလုပ်ခွင် လည်ပတ်ဝင်ရိုး (A axis) | အများဆုံး ပိုင်းခြားမှု နံပါတ် (မီလီမီတာ) | 360° |
| အနိမ့်ဆုံးဌာနခွဲကို သတ်မှတ်ပါ။ | 0.001° | |
| A-ဝင်ရိုး ဆာဗိုမော်တာ ပါဝါ (kw) | ၄.၂ | |
| ပါဝါခေါင်းသည် ဘယ်ညာရွှေ့သည် (X ဝင်ရိုး) | အများဆုံးလေဖြတ်ခြင်း (မီလီမီတာ) | ၂၀၀၀ |
| X-axis ရွေ့လျားမှုအမြန်နှုန်း (m/min) | 0~8 | |
| X-axis ဆာဗာမော်တာ ပါဝါ (kw) | ၂.၄ | |
| ပါဝါခေါင်းသည် အပေါ်နှင့်အောက် ရွေ့လျားသည် (Y ဝင်ရိုး) | အများဆုံးလေဖြတ်ခြင်း (မီလီမီတာ) | ၁၀၀၀ |
| Y-ဝင်ရိုးရွေ့လျားမှုအမြန်နှုန်း (m/min) | 0~8 | |
| Y-ဝင်ရိုး ဆာဗာမော်တာ ပါဝါ (kw) | 2.4 ဘရိတ် | |
| ကော်လံ အလျားလိုက် ရွေ့လျားမှု (Z ဝင်ရိုး) | အများဆုံးလေဖြတ်ခြင်း (မီလီမီတာ) | ၆၀၀ |
| Z ဝင်ရိုးရွေ့လျားမှုအမြန်နှုန်း (m/min) | 0~4 | |
| Z ဝင်ရိုး ဆာဗိုမော်တာ ပါဝါ (kw) | ၂.၄ | |
| နေရာချထားခြင်း တိကျခြင်း။ | 1000mm | ±0.05 |
| အထပ်ထပ် | 1000mm | ±0.025 |
| CNC အညွှန်းကိန်းဇယား အညွှန်းကိန်းတိကျမှု (မီလီမီတာ) |
| 15” |
| စက်အရွယ်အစား (ကာကွယ်မှုအပါအဝင်) | အလျား (X) × အနံ (Z) × အမြင့် (Y) (မီလီမီတာ) | 5300*6000*3400 |
| အကာအကွယ်အပါအဝင် စုစုပေါင်းအလေးချိန် (t) | (၂၀) ခန့် | |