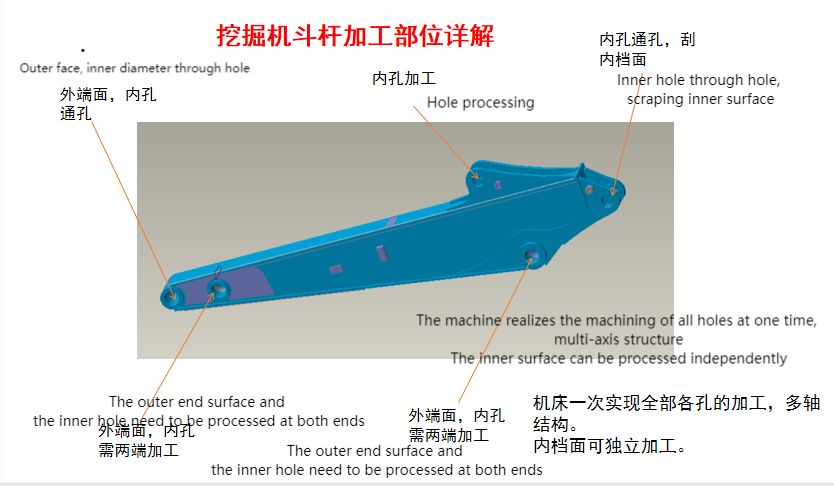
BOSM-1601 ဆန့်ကျင်ဘက်-ခေါင်းငြီးငွေ့ဖွယ်ကြိတ်စက်
1. စက်ပစ္စည်းအသုံးပြုမှု
BOSM-1601 ဘူတာရုံနှစ်ထပ်ကိန်းဂဏန်းထိန်းချုပ်ရေးကော်လံ မိုဘိုင်းလ်နှစ်ထပ်ကော်လံ ထိပ်မှခေါင်းငြီးငွေ့ဖွယ်နှင့် ကြိတ်စက်သည် ဆောက်လုပ်ရေးစက်ပစ္စည်းများ၏ အချိုးကျညီသော အစိတ်အပိုင်းများအတွက် အထူးစက်တစ်ခုဖြစ်သည်။စက်တွင် အထူးရွေ့လျားနိုင်သောကော်လံများနှင့် အလျားလိုက် သိုးထီးနှစ်စုံတို့ တပ်ဆင်ထားပြီး၊ တူးဖော်ခြင်း၊ ကြိတ်ခွဲခြင်း၊ ငြီးငွေ့ဖွယ်ကောင်းသော လုပ်ငန်းခွင်အတွင်း ထိရောက်သော လေဖြတ်ခြင်းအကွာအဝေးအတွင်း အခြားလုပ်ငန်းစဥ်များကို သိရှိနိုင်သောကြောင့် တစ်ကြိမ်တည်းတွင် တစ်နေရာတည်းတွင် လုပ်ဆောင်နိုင်သည် (အလယ်တန်းမလိုအပ်ပါ။ clamping)၊ လျင်မြန်သော loading and unloading speed, fast positioning speed, high processing accuracy and high processing efficiency.
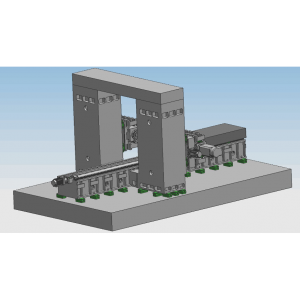
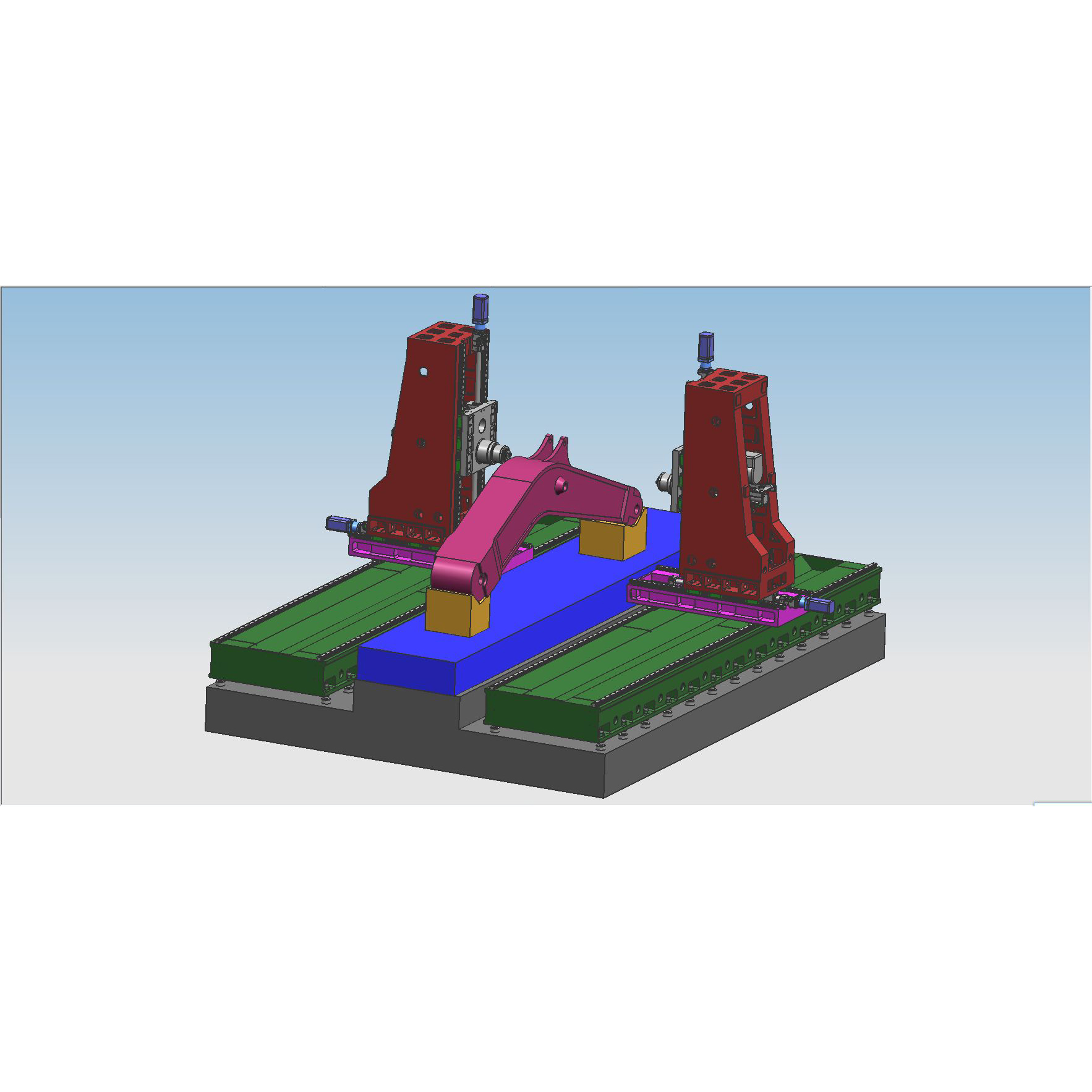
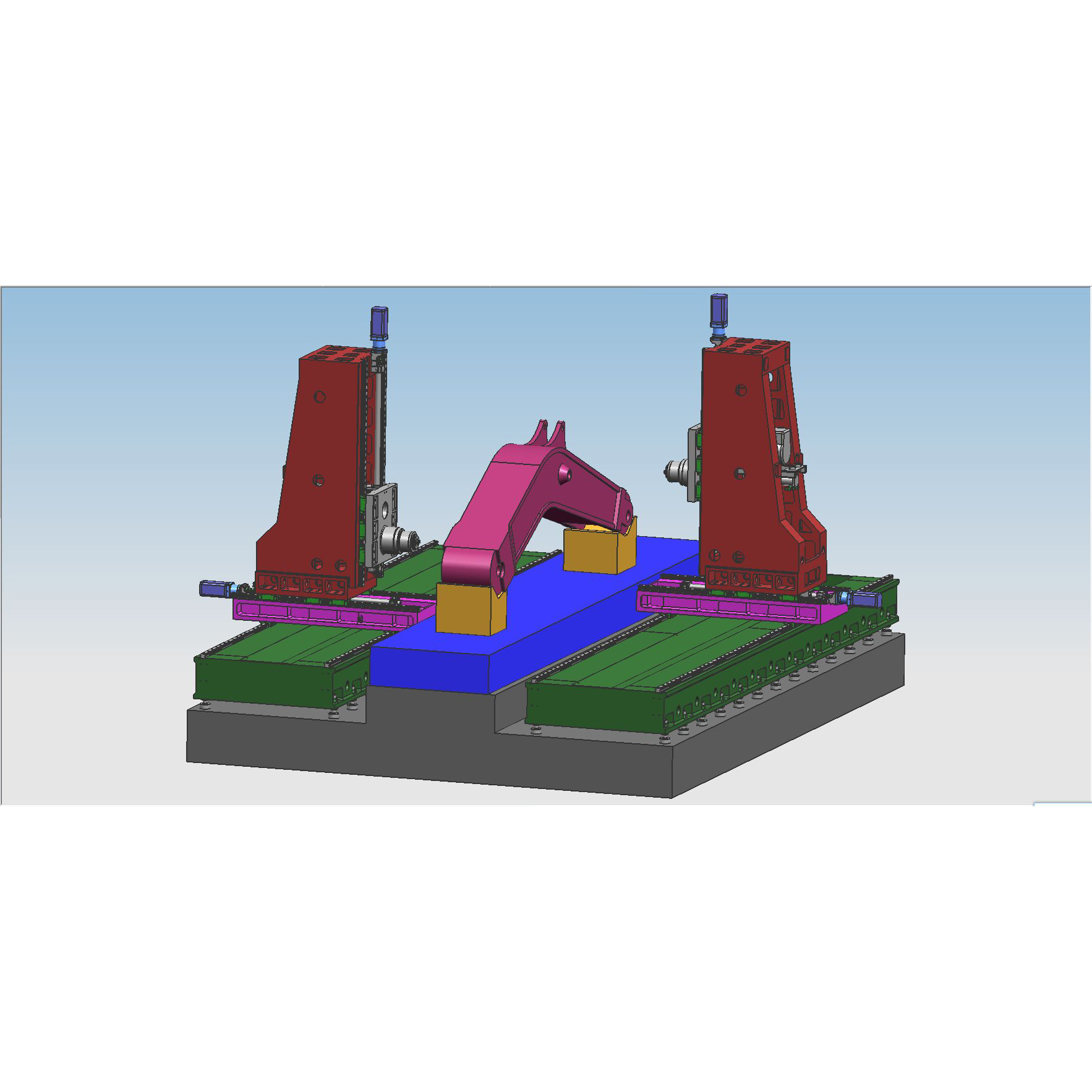
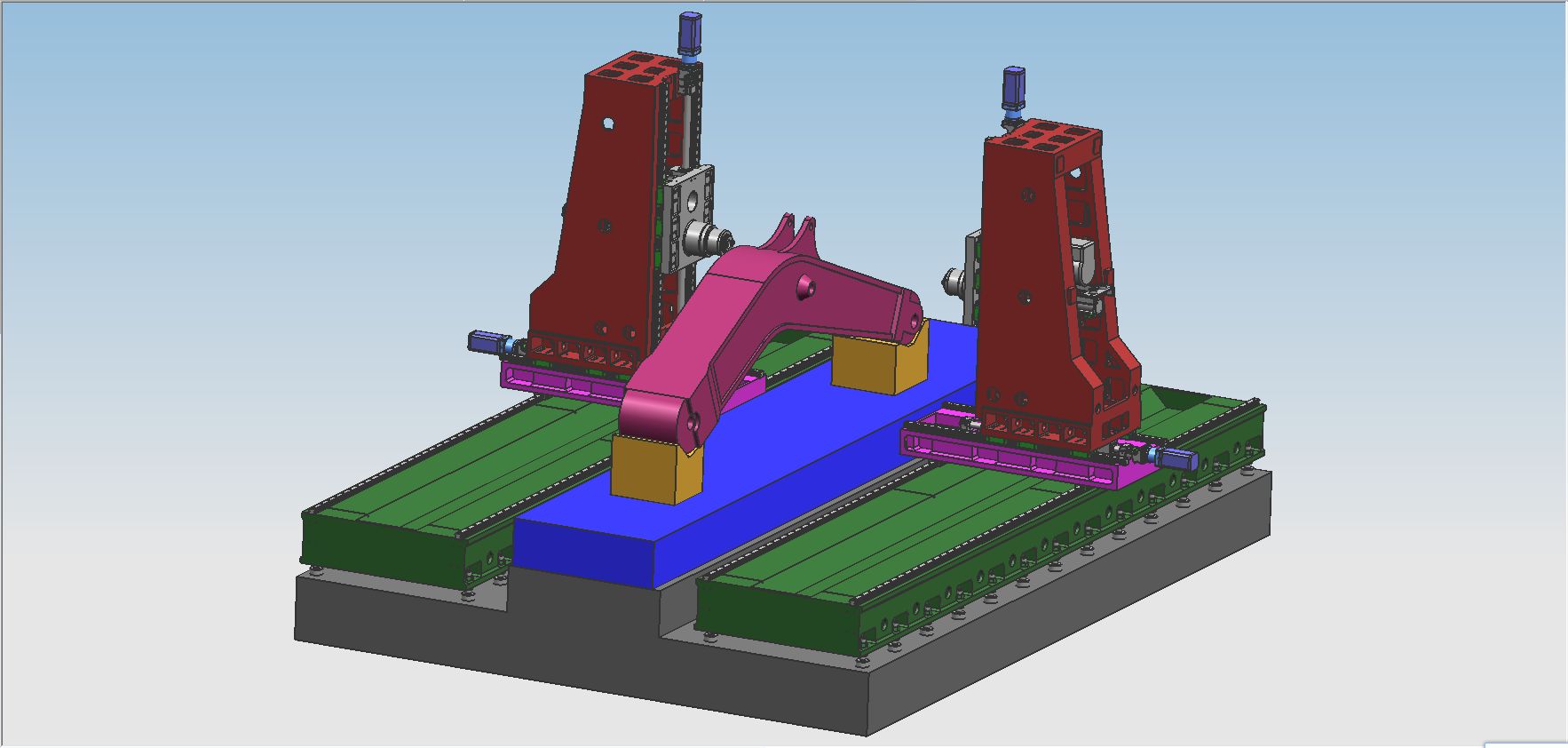
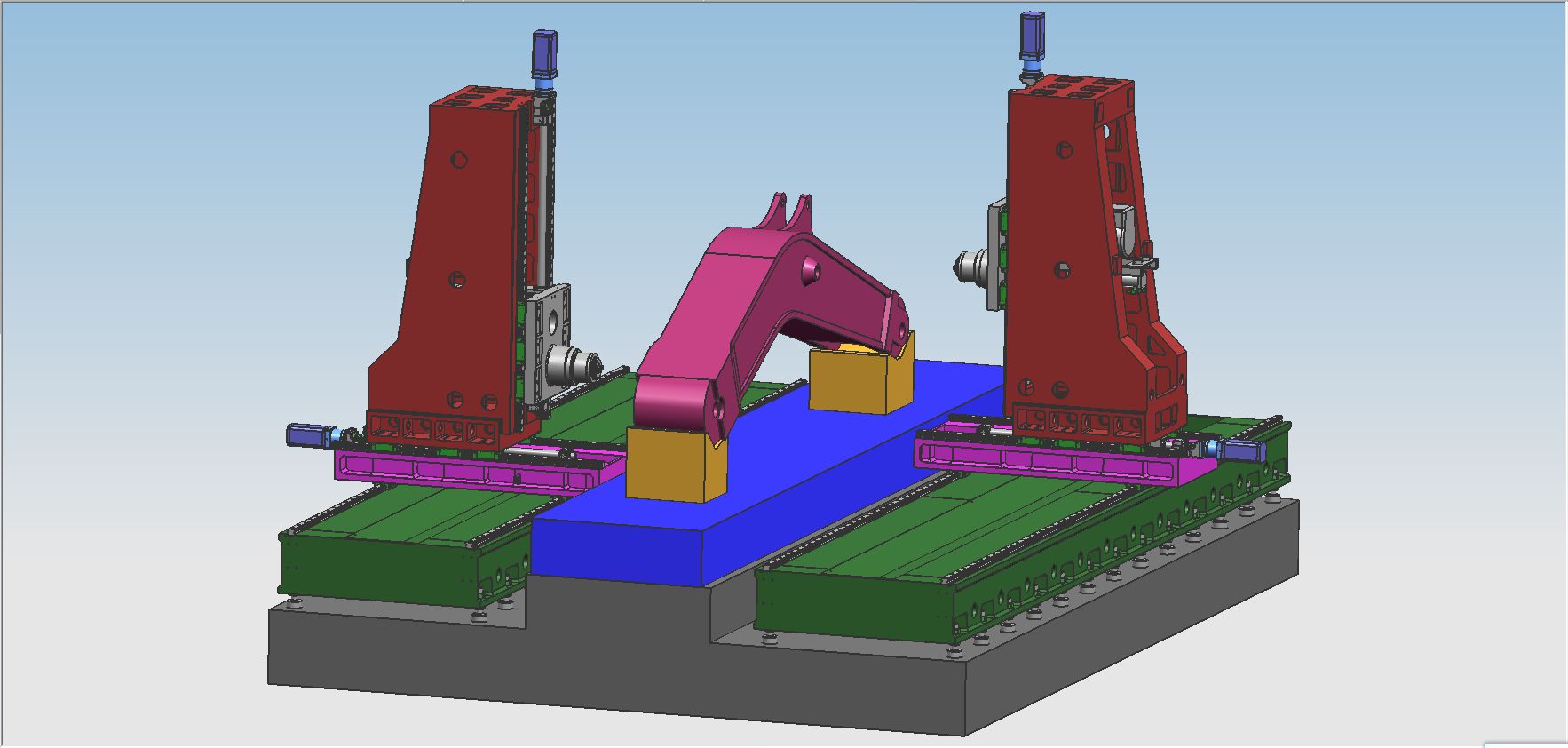
2. စက်၏အဓိကအစိတ်အပိုင်းများ
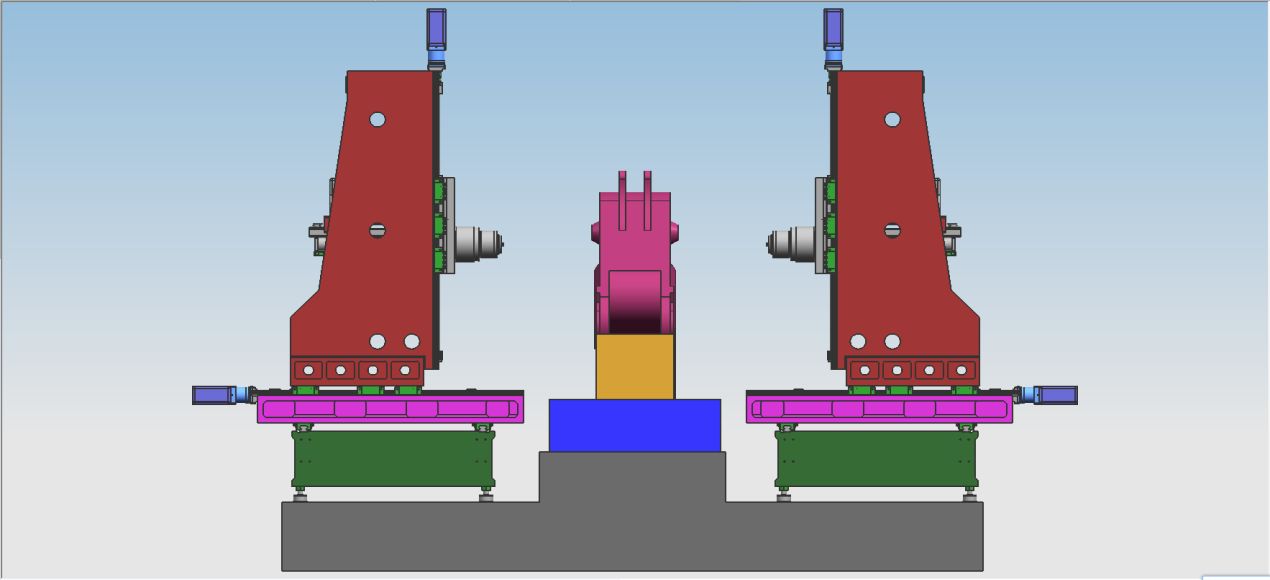
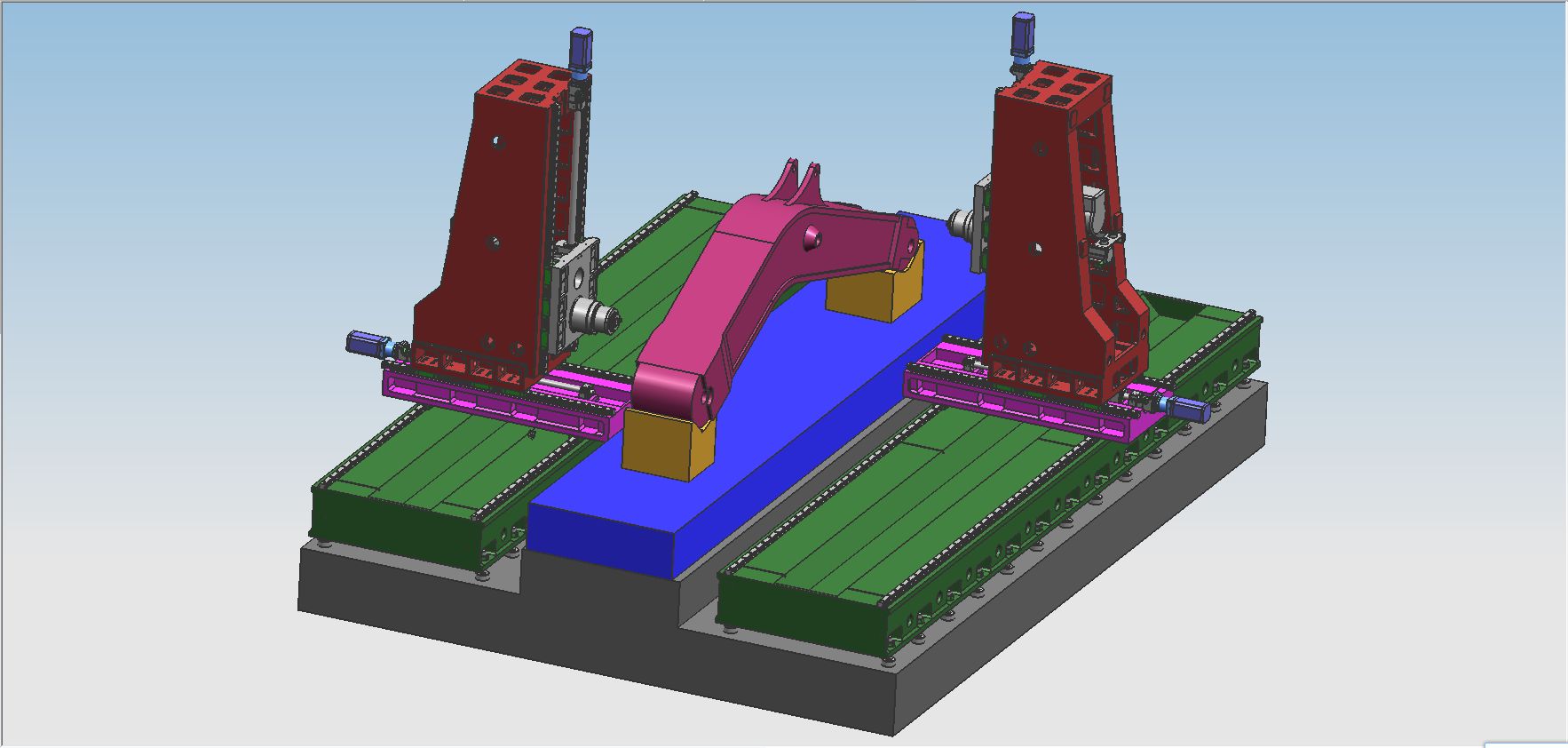
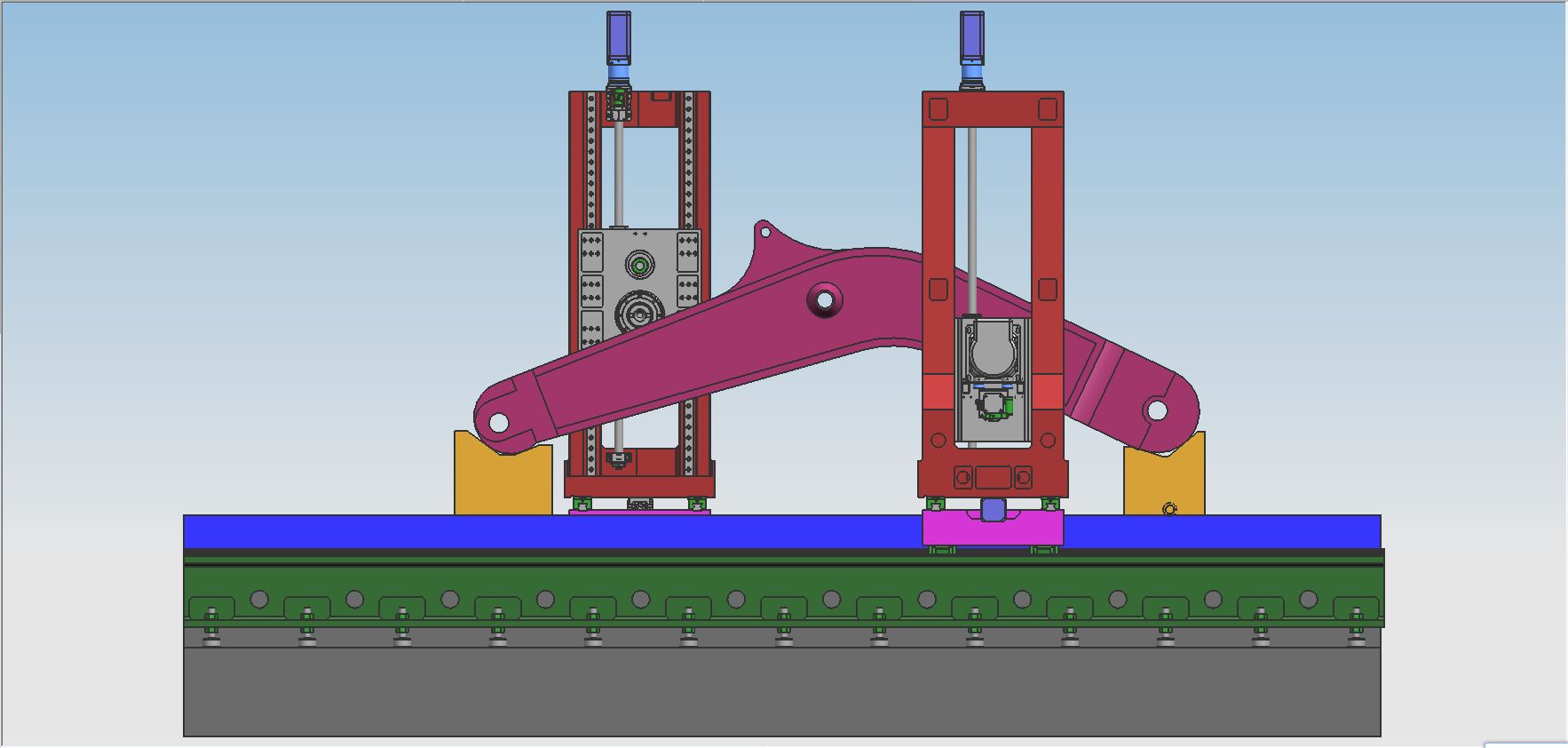
အိပ်ရာ၊ အလုပ်ခုံတန်းများ၊ ဘယ်ညာကော်လံများ၊ ထုပ်တန်းများ၊ ကုန်းနှီးများ၊ သိုးထီးများနှင့် အခြားကြီးမားသော အစိတ်အပိုင်းများကို အစေးသဲပုံသွင်းခြင်း၊ အရည်အသွေးမြင့် မီးခိုးရောင်သံ 250 သွန်းဖြင့် ပြုလုပ်ထားပြီး ပူပြင်းသောသဲတွင်းတွင် မြှုပ်နှံထားသော တုန်ခါမှု → တုန်ခါမှု → ပူပြင်းသော မီးဖိုအတွင်း ပွတ်တိုက်ခြင်း → တုန်ခါမှု အိုမင်းခြင်း → ကြမ်းတမ်းသောစက်ပြုလုပ်ခြင်း → တုန်ခါမှု အိုမင်းခြင်း → ပူပြင်းသော မီးဖိုအတွင်း ပွတ်တိုက်ခြင်း → တုန်ခါမှု အိုမင်းခြင်း → ပြီးဆုံးခြင်း ၊ အစိတ်အပိုင်းများ၏ အပျက်သဘော ဖိစီးမှုကို လုံးဝဖယ်ရှားပေးပြီး အစိတ်အပိုင်းများ၏ စွမ်းဆောင်ရည်ကို တည်ငြိမ်စေပါသည်။စက်တွင် ကြိတ်ခွဲခြင်း၊ ငြီးငွေ့ခြင်း၊ တူးဖော်ခြင်း၊ တန်ပြန်ချခြင်း၊ ပုတ်ခြင်းစသည့် လုပ်ဆောင်ချက်များပါရှိပြီး ကိရိယာအအေးခံနည်းလမ်းမှာ ပြင်ပအအေးခံခြင်းဖြစ်ပြီး၊ စက်တွင် ဝင်ရိုး 4-ဝင်ရိုး ချိတ်ဆက်မှုနှင့် 6-ဝင်ရိုးတစ်ခုတည်း-လုပ်ဆောင်ချက်ကို သိရှိနိုင်သည့် ဖိဒ်ပုဆိန် 6 ခုပါရှိသည်။ပါဝါခေါင်း ၂ လုံးရှိပါတယ်။စက်၏ axial direction နှင့် power head ကို အောက်ပါပုံတွင် ပြထားသည်။
2.1axial ဂီယာ feed ကို၏အဓိကဖွဲ့စည်းပုံမှာအပိုင်း
၂.၁.1 X1/X2 ဝင်ရိုး-ကော်လံသည် ပုံသေကုတင်၏ လမ်းညွှန်ရထားလမ်းတစ်လျှောက် အလျားလိုက် အပြန်အလှန် တုံ့ပြန်သည်။
X-axis ဂီယာ- AC servo motor ဖြင့် မောင်းနှင်ပြီး ထိန်းချုပ်ထားပြီး၊ တိကျသော မြင့်မားသော ဂြိုဟ်သွားအလျှော့ပေးသူသည် ကော်လံနှစ်ခုကို X-axis တစ်လျှောက် ညီညီညာညာ ရွေ့လျားစေသော ball screw ဂီယာအတွဲမှတဆင့် မောင်းနှင်ပေးပါသည်။
လမ်းညွှန်ရထားလမ်းပုံစံ- ခိုင်ခံ့မြင့်မားသော တိကျသောမျဉ်းကြောင်းလမ်းပြရထားလမ်းနှစ်ခုကို အပြားလိုက်ချထားပါသည်။ဂီယာတွဲရှိ ဘောလုံးဝက်အူ၏ တိကျသောအဆင့်သည် C5 ဖြစ်သည်။
2.1.2 Y1/Y2 ဝင်ရိုး-ငြီးငွေ့ဖွယ်ကောင်းသော ကြိတ်ခွဲမှုပါဝါခေါင်း I, II နှင့် ၎င်းတို့၏ကော်လံများကို နှစ်ဖက်စလုံးရှိ အားကောင်းသော အခြေခံလမ်းညွှန်သံလမ်းများပေါ်တွင် အသီးသီး တပ်ဆင်ထားပြီး Y1 နှင့် Y2 axes တစ်လျှောက် အခြေခံလမ်းညွှန်သံလမ်းတစ်လျှောက် အပြန်အလှန် တုံ့ပြန်ကြသည်။AC servo motor ကို ball screw ဂီယာတွဲကို မောင်းနှင်ရန်နှင့် ထိန်းချုပ်ရန်၊ ရွှေ့ရန်အတွက် ကုန်းနှီးကို ဆွဲယူကာ Y ဝင်ရိုးတစ်လျှောက် မျဉ်းသားရွေ့လျားမှုကို သိရှိရန်အတွက် အသုံးပြုသည်။
လမ်းညွှန်ရထားလမ်းပုံစံ- လိုင်းယာလမ်းညွှန်သံလမ်း 4 ခု + ဘောလုံးဝက်အူဒရိုက်။ဂီယာတွဲရှိ ဘောလုံးဝက်အူ၏ တိကျမှုအဆင့်သည် C5 ဖြစ်ပြီး၊ Semi-closed-loop ထိန်းချုပ်မှုကို လက်ခံထားသည်။
2.1.3 Z1/Z2 ဝင်ရိုး-ငြီးငွေ့ဖွယ် နှင့် ကြိတ်ခွဲခြင်း ပါဝါခေါင်း I, II နှင့် ၎င်းတို့၏ လျှောကုန်းနှီးများကို နှစ်ဖက်စလုံးရှိ ကော်လံများ၏ ရှေ့စွန်းများတွင် ဒေါင်လိုက် တပ်ဆင်ထားပြီး Z1 နှင့် Z2 axes တစ်လျှောက် ကော်လံ လမ်းညွန်သံလမ်းများ အပေါ်နှင့် အောက် အပြန်အလှန် တုံ့ပြန်ပါသည်။
Z1-ဝင်ရိုးဂီယာ- AC servo မော်တာအား တိကျသောမြင့်မားသောဂြိုဟ်လျှော့ချပေးသည့်ကိရိယာနှင့် ဘောလုံးဝက်အူဂီယာအတွဲကို မောင်းနှင်ရန်နှင့် ထိန်းချုပ်ရန်အတွက် အသုံးပြုထားပြီး ram ကို Z-ဝင်ရိုးတစ်လျှောက် ညီညာစွာရွေ့လျားရန် မောင်းနှင်ထားသည်။
လမ်းညွှန်ရထားလမ်းပုံစံ- linear guide rail structure 2 ခုကို လက်ခံထားသည်။ဂီယာတွဲရှိ ဘောလုံးဝက်အူ၏ တိကျမှုအဆင့်သည် C5 ဖြစ်သည်။
၂.2 Chip ကို ဖယ်ရှားပြီး အအေးခံပါ။
အလုပ်ခုံအောက်တွင် နှစ်ဖက်စလုံးတွင် ခရုပတ်နှင့် ပြားချပ်ချပ်ချပ်ချပ်ပြား တပ်ဆင်ထားသော ချစ်ပ်များကို ယဉ်ကျေးသောထုတ်လုပ်မှုကို နားလည်ရန် ခရုပတ်နှင့် ကွင်းဆက်ပြားများ အဆင့်နှစ်ဆင့်ဖြင့် အဆုံးတွင် ချစ်ပ်ပြားများကို အလိုအလျောက် ပို့ဆောင်ပေးနိုင်သည်။ကိရိယာ၏ စွမ်းဆောင်ရည်နှင့် ဝန်ဆောင်မှုသက်တမ်းကို သေချာစေရန်အတွက် ကိရိယာ၏ ပြင်ပအအေးခံရန်အတွက် အသုံးပြုနိုင်သည့် အအေးခံကန်အတွင်းရှိ အအေးခံပန့်တစ်ခုရှိပြီး coolant ကို ပြန်လည်အသုံးပြုနိုင်သည်။
3.ဒစ်ဂျစ်တယ် ဂဏန်းထိန်းချုပ်မှုစနစ် အပြည့်အစုံ-
၃.၁။chip breaking function ဖြင့်၊ chip breaking time နှင့် chip breaking cycle ကို man-machine interface တွင် သတ်မှတ်နိုင်ပါသည်။
၃.၂။tool lifting function ပါ၀င်ပြီး tool lifting distance ကို man-machine interface တွင် သတ်မှတ်နိုင်ပါသည်။အကွာအဝေးသို့ရောက်သောအခါ၊ ကိရိယာကို လျင်မြန်စွာ ရုတ်သိမ်းလိုက်ပြီး၊ ချစ်ပ်များကို စွန့်ပစ်ပြီးနောက် ၎င်းကို တူးဖော်သည့်မျက်နှာပြင်သို့ အမြန်ပို့ဆောင်ကာ အလုပ်အဖြစ် အလိုအလျောက် ပြောင်းလဲသွားပါသည်။
၃.၃။Centralized operation control box နှင့် hand-held unit သည် ဂဏန်းထိန်းချုပ်မှုစနစ်ကို ခံယူပြီး USB interface နှင့် LCD အရည် crystal display တပ်ဆင်ထားပါသည်။ပရိုဂရမ်ရေးဆွဲခြင်း၊ သိမ်းဆည်းခြင်း၊ ပြသခြင်းနှင့် ဆက်သွယ်ရေးကို လွယ်ကူချောမွေ့စေရန်အတွက်၊ လည်ပတ်မှု အင်တာဖေ့စ်တွင် လူ-စက် ဆွေးနွေးမှု၊ အမှားအယွင်း လျော်ကြေးပေးခြင်းနှင့် အလိုအလျောက် အချက်ပေးစနစ်တို့ကဲ့သို့သော လုပ်ဆောင်ချက်များ ပါရှိသည်။
၃.၄။စက်ပစ္စည်းသည် မလုပ်ဆောင်မီ အပေါက်အနေအထားကို ကြည့်ရှုစစ်ဆေးခြင်းနှင့် ပြန်လည်စစ်ဆေးခြင်း၏ လုပ်ဆောင်ချက်ပါရှိပြီး လုပ်ဆောင်ချက်သည် အလွန်အဆင်ပြေပါသည်။
4.အလိုအလျောက်ချောဆီ
စက်တိကျသော linear လမ်းညွှန်ရထားတွဲများ၊ တိကျသောဘောလုံးဝက်အူအတွဲများနှင့် အခြားတိကျမှုမြင့်မားသောရွေ့လျားမှုအတွဲများကို အလိုအလျောက်ချောဆီစနစ်များတပ်ဆင်ထားပါသည်။အလိုအလျောက်ချောဆီပန့်သည် ဖိအားဆီထုတ်ပေးပြီး ပမာဏရှိသော ချောဆီခန်းသည် ဆီထဲသို့ဝင်လာသည်။ဆီခန်းကို ဆီဖြည့်ပြီးနောက်၊ စနစ်ဖိအား 1.4-1.75Mpa သို့ တက်လာသောအခါ၊ စနစ်အတွင်းရှိ ဖိအားခလုတ်ကို ပိတ်လိုက်၊ ပန့်သည် ရပ်သွားကာ တစ်ချိန်တည်းတွင် တင်ဆောင်သည့် အဆို့ရှင်ကို ဖြုတ်ပစ်လိုက်သည်။လမ်းရှိ ဆီဖိအား 0.2Mpa အောက်တွင် ကျဆင်းသွားသောအခါ၊ ပမာဏရှိသော ချောဆီသည် ချောဆီပွိုင့်ကို စတင်ဖြည့်သွင်းပြီး ဆီဖြည့်ခြင်းတစ်ခု ပြီးမြောက်ပါသည်။အရေအတွက်ဆီ injector ၏ တိကျသောဆီထောက်ပံ့မှုနှင့် စနစ်ဖိအားကို သိရှိနိုင်သောကြောင့် ဆီထောက်ပံ့မှုသည် ယုံကြည်စိတ်ချရပြီး kinematic အတွဲတစ်ခုစီ၏ မျက်နှာပြင်ပေါ်တွင် ဆီဖလင်တစ်ချပ်ရှိကြောင်း သေချာစေရန်၊ ပွတ်တိုက်မှုနှင့် ဟောင်းနွမ်းမှုတို့ကို လျှော့ချပေးပြီး ပျက်စီးမှုကို ကာကွယ်ပေးသည်။ အပူလွန်ကဲခြင်းကြောင့် ဖြစ်ပေါ်လာသော အတွင်းပိုင်းဖွဲ့စည်းပုံ။စက်၏တိကျမှုနှင့်အသက်တာသေချာစေရန်။လျှောလမ်းပြရထားတွဲနှင့် နှိုင်းယှဉ်ပါက ဤစက်တွင်အသုံးပြုသည့် rolling linear guide rail pair သည် အားသာချက်များစွာရှိပါသည်။
① ရွေ့လျားမှု အာရုံခံနိုင်စွမ်း မြင့်မားခြင်း၊ rolling guide rail ၏ ပွတ်တိုက်မှု ကိန်းဂဏန်းသည် သေးငယ်သည်၊ 0.0025-0.01 သာရှိပြီး သာမန် စက်ယန္တရား 1 ခုနှင့် ညီမျှသော မောင်းနှင်အား အလွန်လျော့သွားသည်။/၁၀။
② ရွေ့လျားမှုနှင့် တည်ငြိမ်သော ပွတ်တိုက်မှုကြား ကွာခြားချက်မှာ အလွန်သေးငယ်ပြီး နောက်ဆက်တွဲ စွမ်းဆောင်ရည်မှာ ကောင်းမွန်သည်၊ ဆိုလိုသည်မှာ မောင်းနှင်မှု အချက်ပြမှုနှင့် စက်ပိုင်းဆိုင်ရာ လုပ်ဆောင်မှုကြားကာလသည် အလွန်တိုတောင်းသည်၊ ၎င်းသည် တုံ့ပြန်မှုအမြန်နှုန်းနှင့် အာရုံခံနိုင်စွမ်းကို ပိုမိုကောင်းမွန်စေပါသည်။ ဂဏန်းထိန်းချုပ်မှုစနစ်။③ ၎င်းသည် မြန်နှုန်းမြင့် မျဉ်းဖြောင့်ရွေ့လျားမှုအတွက် သင့်လျော်ပြီး ၎င်း၏ ချက်ချင်းအမြန်နှုန်းသည် လျှောလမ်းညွှန်သံလမ်းများထက် 10 ဆခန့် ပိုမိုမြင့်မားသည်။④ ၎င်းသည် ကွက်လပ်မရှိသော လှုပ်ရှားမှုကို သိရှိနိုင်ပြီး စက်ပိုင်းဆိုင်ရာ စနစ်၏ ရွေ့လျားမှု တောင့်တင်းမှုကို တိုးတက်စေသည်။⑤ ပရော်ဖက်ရှင်နယ် ထုတ်လုပ်သူများမှ ထုတ်လုပ်ထားသောကြောင့် တိကျမှု၊ ဘက်စုံကောင်းမွန်ပြီး ထိန်းသိမ်းရလွယ်ကူသည်။
5.စက်အသုံးပြုမှုပတ်ဝန်းကျင်-
၅.၁။စက်ကိရိယာအသုံးပြုမှုအတွက် ပတ်ဝန်းကျင်လိုအပ်ချက်များ
ပတ်ဝန်းကျင် အပူချိန်ကို အဆက်မပြတ် ထိန်းသိမ်းခြင်းသည် တိကျစွာ စက်ပစ္စည်းအတွက် မရှိမဖြစ် အရေးကြီးသော အချက်ဖြစ်သည်။
(၁) ရရှိနိုင်သော ပတ်ဝန်းကျင် အပူချိန် လိုအပ်ချက်မှာ -10°C မှ 35°C ဖြစ်ပြီး ပတ်ဝန်းကျင် အပူချိန် 20°C တွင် စိုထိုင်းဆ 40% မှ 75% ဖြစ်သင့်ပါသည်။
(၂) သတ်မှတ်ထားသော အကွာအဝေးအတွင်း စက်၏တည်ငြိမ်တိကျမှုကို ထိန်းထားနိုင်ရန်၊ အကောင်းဆုံးပတ်ဝန်းကျင်အပူချိန်သည် 15°C မှ 25°C ဖြစ်ရန်နှင့် အပူချိန်ကွာခြားချက် လိုအပ်ပါသည်။
±2°C/24နာရီထက် မကျော်လွန်ရပါ။
5.2 ပါဝါထောက်ပံ့မှုဗို့အား- 3-အဆင့်၊ 380V၊ ±10% ဗို့အားအတက်အကျအကွာအဝေးအတွင်း၊ ပါဝါထောက်ပံ့မှုအကြိမ်ရေ- 50HZ။
5.3 အလုပ်လုပ်သောဧရိယာရှိ ဗို့အားမတည်ငြိမ်ပါက၊ စက်၏ပုံမှန်လည်ပတ်မှုကိုသေချာစေရန်အတွက် စက်အား တည်ငြိမ်သောပါဝါထောက်ပံ့မှုတစ်ခုတပ်ဆင်ထားသင့်သည်။
5.4 စက်တွင် ယုံကြည်စိတ်ချရသော grounding ရှိသင့်သည်- မြေစိုက်ဝါယာကြိုးသည် ကြေးနီဝါယာကြိုးဖြစ်ပြီး ဝါယာအချင်း 10mm² ထက်မနည်းသင့်ဘဲ၊ မြေပြင်ခံနိုင်ရည်မှာ 4 ohms သို့ သေးငယ်သည်။
5.5 စက်ပစ္စည်းများ၏ ပုံမှန်လုပ်ငန်းဆောင်တာများကို သေချာစေရန်အတွက်၊ လေအရင်းအမြစ်၏ ဖိသိပ်ထားသောလေသည် လေအရင်းအမြစ်၏လိုအပ်ချက်များနှင့် မကိုက်ညီပါက၊ ၎င်းကို စက်ပေါ်တွင် တပ်ဆင်သင့်သည်။
လေထုမဝင်မီ လေအရင်းအမြစ်သန့်စင်သည့်ကိရိယာ (dehumidification၊ degreasing၊ filter) အစုံထည့်ပါ။
5.6 တိုက်ရိုက်နေရောင်ခြည်၊ တုန်ခါမှုနှင့် အပူရင်းမြစ်များ၊ ကြိမ်နှုန်းမြင့်ဂျင်နရေတာများ၊ လျှပ်စစ်ဂဟေဆော်စက်များ စသည်တို့မှ စက်ပစ္စည်းများကို စက်ထုတ်လုပ်မှုချို့ယွင်းမှု သို့မဟုတ် စက်တိကျမှုဆုံးရှုံးခြင်းမှ ရှောင်ရှားရန် စက်ပစ္စည်းများကို ဝေးဝေးထားပါ။
6.နည်းပညာဆိုင်ရာဘောင်များ
| မော်ဒယ် | ၁၆၀၁ | |
| လုပ်ငန်းဆောင်ရွက်ဆဲ အရွယ်အစား | အလျား × အနံ × အမြင့် (မီလီမီတာ) | 16000×1000×1500 |
| စက် အများဆုံး ကျွေးသည်။ | အနံ (မီလီမီတာ) | ၁၃၀၀ |
| အလုပ်စားပွဲအရွယ်အစား | အလျား X အနံ (မီလီမီတာ) | 16000*1000 |
| ကော်လံခရီး | ကော်လံကို နောက်ပြန်ရွှေ့ (mm) | ၁၆၀၀ |
| အပေါ်နှင့် အောက်ကို နှိုက်ပါ။ | အတက်အဆင်း ခရီး (မီလီမီတာ) | ၁၅၀၀ |
| spindle center မှ table plane အထိ အမြင့် | 100-1600mm | |
| အလျားလိုက် မြင့်မားသော ခွန်အားဗိုင်းလိပ်တံ power head one two | အရေအတွက် (၂)၊ | ၂ |
| ဗိုင်းလိပ်တံသွယ် | BT50 | |
| ချောင်းရေ | အလိုအလျောက် ဖြတ်တောက်ခြင်း၊ လက်စွဲကိရိယာ ပြောင်းလဲခြင်း။ | |
| အချင်း (မီလီမီတာ) | ≤Φ200 | |
| အချင်း (မီလီမီတာ) | M3-M30 | |
| Spindle အမြန်နှုန်း (r/min) | 30~3000 | |
| ဆာဗိုဗိုင်းလိပ်တံမော်တာ ပါဝါ (kw) | ၃၀*၂ | |
|
| ဗိုင်းလိပ်တံနှစ်ခုကြားတွင် ဘယ်နှင့်ညာ ခရီးအကွာအဝေး | 400-1600mm |
| ကော်လံနှစ်ထပ် (မီလီမီတာ) ၏ ဘယ်နှင့်ညာ ခရီး၊ | တစ်ယောက်ကို ၆၀၀ | |
| ကိရိယာအအေးခံခြင်း။ | အတွင်းအအေး၊ ပြင်ပအအေး | |
| Bidirectional Positioning တိကျမှု | 300mm | ±0.032 |
| Bi-directional ထပ်တလဲလဲ နေရာချထားမှု တိကျမှု | 300mm | ±0.025 |
| စက်အတိုင်းအတာများ | အလျား × အနံ × အမြင့် (မီလီမီတာ) | ပုံများအတိုင်း (ဒီဇိုင်းလုပ်ငန်းစဉ်တွင် အပြောင်းအလဲရှိပါက ကျွန်ုပ်တို့ထံ အကြောင်းကြားပါမည်) |
| စုစုပေါင်းအလေးချိန် (t) | 72T | |