Four Station Shaft Flange Drilling Machine

စက်အင်္ဂါရပ်များ
4-ဘူတာရုံအနားကွပ် CNC တူးဖော်ခြင်းနှင့် ကြိတ်စက်စီးရီးကို စက်ဝိုင်းပုံအနားကွပ်လုပ်ဆောင်ခြင်းအတွက် အဓိကအားဖြင့် အသုံးပြုကြပြီး ဝက်ရိုးတံများ၊ ပြားပြားများ၊ အစွန်းအထင်းများ၊ ဒစ်ခ်များနှင့် လက်စွပ်များကဲ့သို့သော ထိရောက်သောအကွာအဝေးအတွင်း အထူများရှိသော workpieces များကို ထိရောက်စွာတူးဖော်ခြင်း/ကြိတ်ခြင်းအတွက်လည်း အသုံးပြုနိုင်ပါသည်။ / ပုတ်ခြင်း / ကောက်နှုတ်ခြင်း / ထွင်းထုခြင်းနှင့်အခြားလုပ်ငန်းစဉ်များ။အပေါက်များနှင့် မျက်မမြင်အပေါက်များကို ရိုးရှင်းသော ပစ္စည်းအစိတ်အပိုင်းများနှင့် ပေါင်းစပ်ပစ္စည်းများတွင် တူးဖော်နိုင်သည်။စက်ကိရိယာကို ဒစ်ဂျစ်တယ်စနစ်ဖြင့် ထိန်းချုပ်ထားပြီး လွယ်ကူစွာ လည်ပတ်နိုင်သည်။အလိုအလျောက်စနစ်၊ မြင့်မားသောတိကျမှု၊ မျိုးစုံမျိုးကွဲများ၊ အစုလိုက်အပြုံလိုက်ထုတ်လုပ်မှုကို ရရှိနိုင်သည်။
စက်ဖွဲ့စည်းပုံ
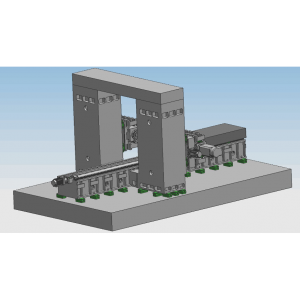
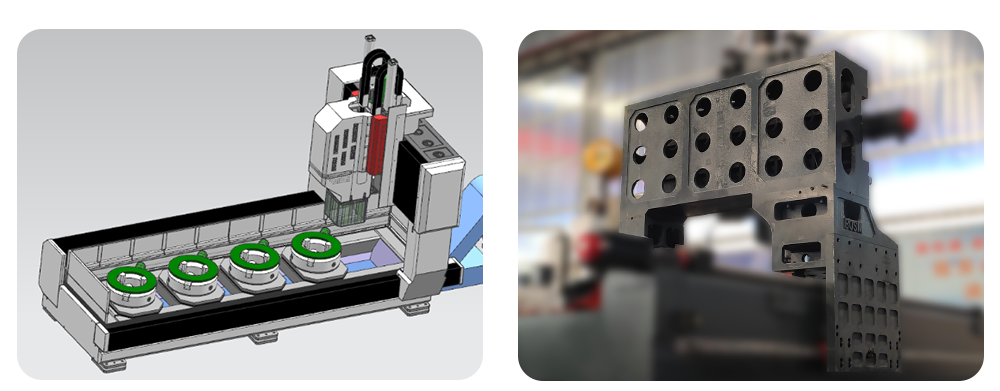
ဤစက်တွင် အဓိကအားဖြင့် အလုပ်စားပွဲ၊ ဟိုက်ဒရောလစ်မေးရိုးလေးခုကို ဗဟိုပြုသည့် chuck လေးစုံ၊ မိုဘိုင်းဂရန်ထရီတစ်ခု၊ မိုဘိုင်းလျှောကုန်းနှီး၊ တူးဖော်ခြင်းနှင့် ကြိတ်ခြင်းပါဝါခေါင်း၊ အလိုအလျောက်ချောဆီစက်နှင့် အကာအကွယ်ကိရိယာ၊ လည်ပတ်နေသော အအေးပေးစက်၊ ဒစ်ဂျစ်တယ်ထိန်းချုပ်မှုစနစ်၊ လျှပ်စစ်စနစ်။စသည်တို့ကို ဖွဲ့စည်းမှု။rolling line guide နှင့် တိကျသော ဝက်အူဒရိုက်ကို ပံ့ပိုးပေးခြင်း၊ လမ်းညွှန်ပေးခြင်း ၊ စက်ကိရိယာသည် မြင့်မားသော positioning တိကျမှုနှင့် ထပ်ခါတလဲလဲ နေရာချထားခြင်း တိကျမှုရှိပါသည်။
1. အိပ်ရာ အလုပ်စားပွဲ
အိပ်ရာကို သံမဏိတည်ဆောက်ပုံ အစိတ်အပိုင်းများဖြင့် ပြုလုပ်ထားသည်။Secondary Tempering Treatment ဖြင့် အပြီးသတ်သည်။၎င်းသည် ကောင်းမွန်သော ရွေ့လျားမှုနှင့် တည်ငြိမ်တောင့်တင်းမှုရှိပြီး ပုံပျက်မသွားပါ။အလုပ်စားပွဲတွင် 500 မီလီမီတာ မေးရိုးလေးခုကို ဗဟိုပြုသော ဟိုက်ဒရောလစ် chucks လေးခုကို အသုံးပြု၍ အလုပ်အပိုင်းများကို လျင်မြန်စွာ ကုပ်သည်။ကုတင်၏ တစ်ဖက်တစ်ချက်စီတွင် အလွန်စွမ်းရည်မြင့်သော အလှည့်ကျလမ်းညွှန်အတွဲနှစ်ခုကို တပ်ဆင်ထားသည်။နေရာချထားပြီးနောက်၊ တင်သွင်းလာသော ပြင်းထန်မှုမြင့်သောသော့ခတ်မှု နှစ်စုံ အစွမ်းထက်သောရထားကုပ်ကို ခိုင်မာစွာနေရာချထားပြီး ရထားလမ်းပေါ်တွင်သော့ခတ်ထားသည်။ရထားလမ်းဆလိုက်ကို မထိခိုက်စေဘဲ ကုပ်ကလစ်သည် ပြီးပြည့်စုံစွာ လိုက်ဖက်ပါသည်။ကလစ်အဖွင့်နှင့်အပိတ်အချိန်သည် 0.06 စက္ကန့်သာရှိပြီး လုပ်ဆောင်ချိန်ကို အလွန်တိုစေပါသည်။ဒရိုက်စနစ်သည် bus absolute servo motor နှင့် တိကျမှုကိုအသုံးပြုပြီး ball screw သည် gantry ကို Y-axis ဦးတည်ရာသို့ ရွေ့လျားစေရန် မောင်းနှင်ပေးပါသည်။ကုတင်၏အောက်ခြေတွင် ချိန်ညှိနိုင်သော bolts များကို ဖြန့်ပေးထားပြီး ကုတင်၏ အဆင့်ကို အလွယ်တကူ ချိန်ညှိနိုင်သည်။
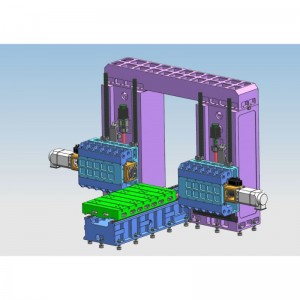
2.Mobile Gantry-
Mobile Gantry ကို မီးခိုးရောင်သံ 250 ဖြင့် သွန်းထားသည်။ လေးလံသော beam ၏ အမြင့်မှာ ၎င်း၏ ကြံ့ခိုင်မှုကို မြှင့်တင်ရန် 800mm ဖြစ်သည်။စူပါစွမ်းရည်မြင့် rolling linear guideအတွဲနှစ်ခုကို gantry ၏အရှေ့ဘက်ခြမ်းတွင် တပ်ဆင်ထားသည်။အပြာရောင်ဆလိုက်ဒါသည် Y ဝင်ရိုးလမ်းကြောင်းအတိုင်း ပါဝါခေါင်းဆလိုက်ကို ရွှေ့ရန် တိကျသောဘောလုံးဝက်အူအတွဲနှင့် ဆာဗာမော်တာကို အသုံးပြုသည်။ပါဝါခေါင်းလျှောပေါ်တွင် တူးဖော်ပါဝါခေါင်းကို တပ်ဆင်ထားသည်။တိကျသောအချိတ်အဆက်မှတဆင့် ball screw ပေါ်တွင်လှည့်ရန် servo motor မှ gantry ၏ရွေ့လျားမှုကို သိရှိသည်။
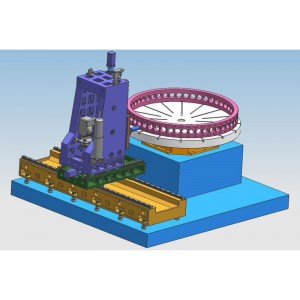
3.မိုဘိုင်းလျှောကုန်းနှီး-
မိုဘိုင်းလျှောကုန်းနှီးသည် တိကျသော သွန်းသံဖွဲ့စည်းပုံဆိုင်ရာ အစိတ်အပိုင်းတစ်ခုဖြစ်သည်။လမ်းပြရထားလမ်း၏ အလယ်ဗဟိုအကွာအဝေးကို တိုးမြှင့်ရန် လျှောကုန်းနှီးကို ကျယ်စေပြီး တိုးလာသည်။အလွန်စွမ်းရည်မြင့်မားသော rolling linear guide rail အတွဲနှစ်စုံနှင့် တိကျသောဘောလုံးဝက်အူအတွဲများကို တိကျမှုမြင့်မားသောလက်တံနှင့် ချိတ်ဆက်ထားပြီး ဘရိတ်ဆာဗိုမော်တာသည် ရှေ့သို့လျင်မြန်စွာသိရှိနိုင်သော Z-axis ဦးတည်ရာသို့ရွေ့လျားရန် တူးဖော်ခြင်းပါဝါဦးခေါင်းကို မောင်းနှင်ပေးပါသည်။ စက်မှုလုပ်ငန်းတိုးတက်နေခြင်း၊ အမြန်ပြန်ရစ်ခြင်း၊ ပါဝါခေါင်း၏ရပ်တန့်ခြင်း။အလိုအလျောက် ချစ်ပ်ကွဲခြင်း၊ ချစ်ပ်ဖယ်ရှားခြင်း၊ ခေတ္တရပ်ခြင်း လုပ်ဆောင်ချက်များဖြင့်။

4.တူးဖော်ပါဝါခေါင်း-
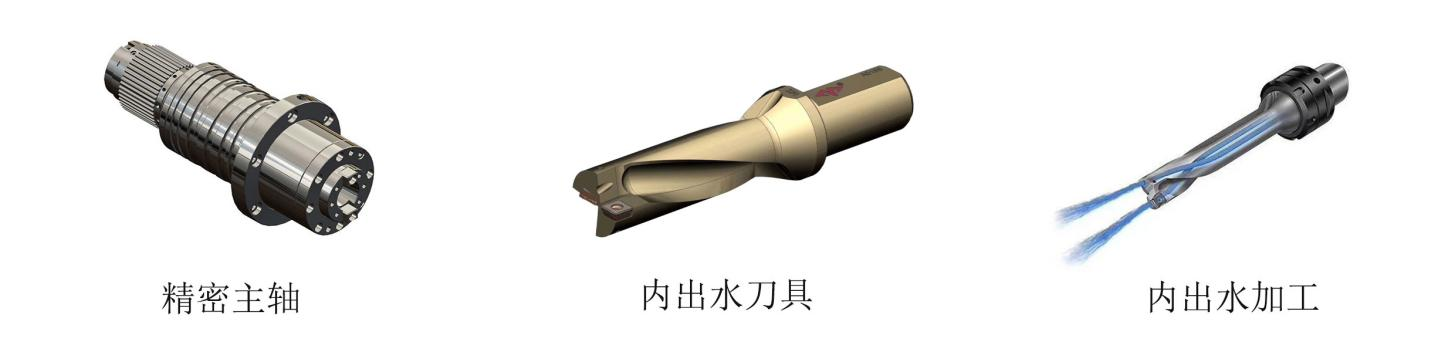
တူးဖော်မှုပါဝါခေါင်းသည် သီးသန့် ဆာဗိုဗိုင်းလိပ်တံမော်တာကို အသုံးပြုသည်။တိကျသောစက်မှုဗိုင်းလိပ်တံအား torque တိုးမြင့်ရန်အတွက် သွားကြိတ်ထားသော synchronous ခါးပတ်၏အရှိန်ဖြင့် မောင်းနှင်သည်။spindle သည် ရှေ့သုံး၊ နှစ်၊ နှင့် ငါးတန်း ဂျပန် angular contact bearings ကို ခြေလှမ်းမရှိသော အမြန်နှုန်းပြောင်းလဲမှုကို ရရှိစေရန် အသုံးပြုသည်။လျင်မြန်ပြီး လွယ်ကူသော အစားထိုးမှု၊ အစာကို ဆာဗာမော်တာနှင့် ဘောလုံးဝက်အူများဖြင့် မောင်းနှင်သည်။X နှင့် Y axes များကို ချိတ်ဆက်နိုင်ပြီး semi-closed loop control ကို linear နှင့် circular interpolation functions များရရှိရန် အသုံးပြုနိုင်သည်။
5. Flat ကွင်းဆက် အလိုအလျောက် ချစ်ပ်ပြားပျံ နှင့် လည်ပတ်နေသော အအေးခံကိရိယာ
ဤစက်တွင် ကွင်းဆက်အပြားလိုက် အော်တိုမက်တစ် ချစ်ပ်သယ်ယူသူနှင့် ချစ်ပ်စုဆောင်းစက် တပ်ဆင်ထားသည်။လည်ပတ်နေသော အအေးခံကိရိယာတွင် ဖိအားမြင့်အတွင်းပိုင်းအအေးခံပန့်နှင့် ကိရိယာ၏အတွင်းပိုင်းနှင့် ပြင်ပအအေးပေးရန်အတွက် ဖိအားမြင့်ပြင်ပအအေးခံပန့်ပါရှိသော စက္ကူစစ်ထုတ်စက်ကို တပ်ဆင်ထားပါသည်။
5.1 အလိုအလျောက်ချောဆီစက်နှင့် အကာအကွယ်ကိရိယာ-
ဤစက်တွင် ထိုင်ဝမ်၏ မူရင်း volumetric တစ်စိတ်တစ်ပိုင်း ဖိအား အလိုအလျောက် ချောဆီစက်ကို တပ်ဆင်ထားပြီး၊ လမ်းပြသံလမ်းများ၊ ခဲဝက်အူများနှင့် အခြားရွေ့လျားအတွဲများကို အလိုအလျောက် ချောဆီပေးကာ စက်၏ ဝန်ဆောင်မှုသက်တမ်းကို သေချာစေရန် ထောင့်သေအပေါက်မရှိပါ။စက်ကိရိယာ၏ X-axis နှင့် Y-axis တွင် ဖုန်ဒဏ်ခံနိုင်သော အကာအကွယ်အဖုံးများ တပ်ဆင်ထားပြီး၊ အလုပ်ခုံတန်းလျားတစ်ဝိုက်တွင် ရေစိုခံအကာများကို တပ်ဆင်ထားသည်။
6. CNCထိန်းချုပ်မှုစနစ်
၆.၁။chip breaking function ဖြင့်၊ chip breaking time နှင့် chip breaking cycle ကို man-machine interface တွင် သတ်မှတ်နိုင်ပါသည်။
၆.၂။tool lifting function ဖြင့် tool lifting height ကို man-machine interface တွင် သတ်မှတ်နိုင်သည်။ဤအမြင့်သို့ တူးဖော်သည့်အခါ၊ တူးသည့်ဘစ်ကို အလုပ်ခွင်အထက်သို့ လျင်မြန်စွာ မြှောက်ထားပြီး ချစ်ပ်ပြားကို ရိုက်ခွဲကာ တူးဖော်သည့်မျက်နှာပြင်သို့ အမြန်ပို့ကာ အလုပ်အဖြစ် အလိုအလျောက် ပြောင်းလဲသွားပါသည်။
၆.၃။ဗဟိုချုပ်ကိုင်မှုရှိသော လည်ပတ်ထိန်းချုပ်မှုသေတ္တာနှင့် လက်ကိုင်ယူနစ်သည် ဂဏန်းထိန်းချုပ်မှုစနစ်ကို လက်ခံကျင့်သုံးပြီး USB မျက်နှာပြင်နှင့် LCD မျက်နှာပြင်တစ်ခု တပ်ဆင်ထားသည်။ပရိုဂရမ်ရေးဆွဲခြင်း၊ သိမ်းဆည်းခြင်း၊ ပြသခြင်းနှင့် ဆက်သွယ်ရေးကို လွယ်ကူချောမွေ့စေရန်အတွက်၊ လည်ပတ်မှု အင်တာဖေ့စ်တွင် လူ-စက် ဆွေးနွေးမှု၊ အမှားအယွင်း လျော်ကြေးပေးခြင်းနှင့် အလိုအလျောက် အချက်ပေးစနစ်တို့ကဲ့သို့သော လုပ်ဆောင်ချက်များ ပါရှိသည်။
၆.၄။စက်ပစ္စည်းသည် မလုပ်ဆောင်မီ အပေါက်အနေအထားကို ကြည့်ရှုစစ်ဆေးခြင်းနှင့် ပြန်လည်စစ်ဆေးခြင်း လုပ်ဆောင်ချက်ပါရှိပြီး လည်ပတ်မှုမှာ အလွန်အဆင်ပြေပါသည်။

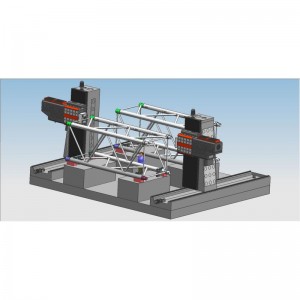
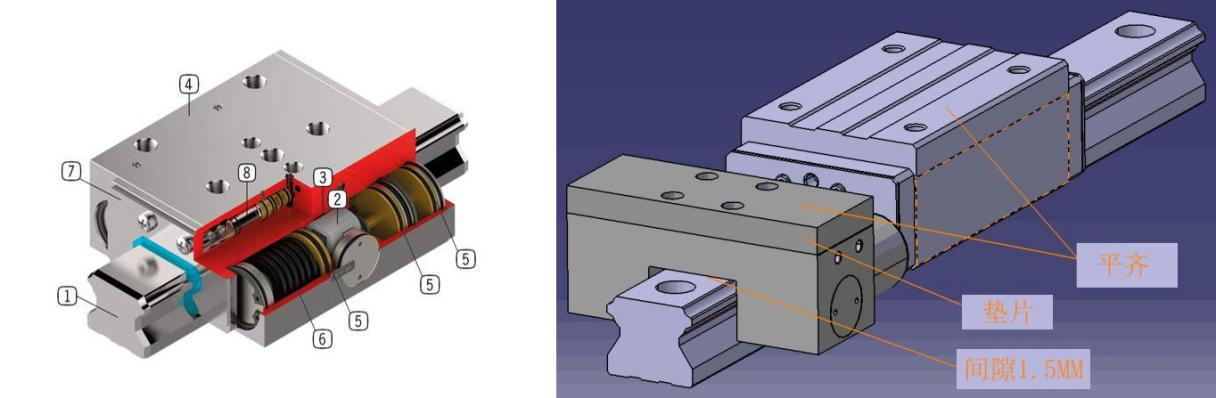
7. ရထားကုပ်:
ကုပ်သည် ကုပ်၏အဓိကကိုယ်ထည်၊ actuators စသည်တို့ဖြင့် ဖွဲ့စည်းထားသည်။ ၎င်းသည် rolling linear guide pair နှင့် တွဲဖက်အသုံးပြုသည့် စွမ်းဆောင်ရည်မြင့်မားသည့် အစိတ်အပိုင်းတစ်ခုဖြစ်သည်။သပ်တုံးတွန်းအားချဲ့ထွင်ခြင်းနိယာမအားဖြင့်၊ ၎င်းသည် ခိုင်ခံ့သော ကုပ်ကြိုးကိုထုတ်ပေးသည်။၎င်းတွင် တင်းမာမှုကို မြှင့်တင်ရန်အတွက် ပုံသေ gantry၊ တိကျသောနေရာချထားမှု၊ တုန်ခါမှုဆန့်ကျင်ခြင်းနှင့် တင်းမာမှုတိုးတက်စေသော Function ပါရှိသည်။
အောက်ပါလက္ခဏာများ ရှိသည်-
Ø 1) ဘေးကင်းပြီး ယုံကြည်စိတ်ချရသော၊ ခိုင်ခံ့သောကုပ်ဆွဲအား၊ တူးဖော်ခြင်းနှင့် ခြစ်ခြင်းလုပ်ဆောင်နေစဉ်အတွင်း မရွှေ့မပြောင်းနိုင်သော XY ဝင်ရိုးကို ကုပ်ပါ။
Ø 2) အလွန်မြင့်မားသော ကုပ်ဆွဲအားသည် axial feed ၏ တင်းမာမှုကို တိုးစေပြီး တုန်ခါမှုကြောင့် ဖြစ်ပေါ်လာသော တုန်ခါမှုမှ ကာကွယ်ပေးသည်။
Ø 3) လျင်မြန်သောတုံ့ပြန်မှု၊ အဖွင့်နှင့်အပိတ်တုံ့ပြန်ချိန်သည် 0.06 စက္ကန့်သာရှိပြီး စက်ကိရိယာကိုကာကွယ်နိုင်ပြီး ခဲဝက်အူ၏သက်တမ်းကိုတိုးစေသည်။
Ø 4) တာရှည်ခံ၊ နီကယ်ချထားသည့် မျက်နှာပြင်၊ သံချေးတက်ခြင်း စွမ်းဆောင်ရည် ကောင်းမွန်ခြင်း။
Ø 5) တင်းကျပ်သည့်အခါ တင်းကျပ်သော ထိခိုက်မှုမဖြစ်စေရန် ဆန်းသစ်သောဒီဇိုင်း။
ထူးခြားချက်n
| မော်ဒယ် | BOSM-DS500 | ယူနစ် | |
| အများဆုံး workpiece အရွယ်အစား | ပြင်ချင်း | ၅၀-၅၀၀ | mm |
| အများဆုံး workpiece အမြင့် | ၃၀၀ | Kg | |
| ဝက်ရိုးတံအချင်း | ≤200 | mm | |
| ရှပ်အရှည် | အခြေခံအုတ်မြစ်အတိုင်း 700mm တိုးမြှင့်နိုင်သည်။ | mm | |
| Workpiece အထူ | တူးအချင်း ≤5 ဆ | mm | |
| Vertical ram အမျိုးအစား တူးဖော်ပါဝါခေါင်း | QTY | 1 | Ps |
| ဗိုင်းလိပ်တံသွယ် | BT40 | ||
| အချင်းတူး | Φ2-Φ36 | mm | |
| ပုတ်ခြင်းအပိုင်း | M6-M24 | ||
| ဗိုင်းလိပ်တံအရှိန် | 30~3000 | r/mm | |
| Servo spindle မော်တာပါဝါ | 15 | Kw | |
| spindle အောက်ခြေမှ worktable သို့အကွာအဝေး | 150-550mm±20 | mm | |
| ပါဝါခေါင်း၏ ဘေးတိုက်ရွေ့လျားမှု (X Axis) | MAXခရီးသွား | ၂၆၀၀ | mm |
| X Axis မြန်နှုန်း | 0~8 | m/min | |
| X Axis ဆာဗာမော်တာပါဝါ | ၂.၄ | Kw | |
| ရွေ့လျားနေသော အလင်းတန်း၏ အလျားလိုက် ရွေ့လျားမှု (Y Axis) | MAXခရီးသွား | ၅၀၀ | mm |
| Y ဝင်ရိုးအမြန်နှုန်း | 0~8 | m/min | |
| Y Axis ဆာဗာမော်တာပါဝါ | ၂.၄ | Kw | |
| ဒေါင်လိုက် ဇလီဖားတုံး အစာကျွေးခြင်း လှုပ်ရှားမှု (Z ဝင်ရိုး) | MAXခရီးသွား | ၄၀၀ | mm |
| Z ဝင်ရိုးအမြန်နှုန်း | 0~4 | m/min | |
| Z Axis ဆာဗာမော်တာပါဝါ | 1×2.4 ဘရိတ် | Kw | |
| နေရာချထားခြင်း တိကျခြင်း။ | 500x500 | ±0.03 | mm |
| အညွှန်း တိကျမှု | 360° | ±0.001° | |
| စက်အရွယ်အစား | အလျား x အနံ x အမြင့် | ၃၆၀၀×၁၆၅၀×၂၃၀၀ | mm |
| စက်အလေးချိန် | ၈.၅ | T | |
အရည်အသွေးစစ်ဆေးခြင်း။
စက်တစ်ခုစီကို United Kingdom RENISHAW ကုမ္ပဏီမှ လေဆာ interferometer ဖြင့် ချိန်ညှိထားပြီး pitch error များ၊ backlash ၊ positioning accuracy နှင့် ထပ်ခါတလဲလဲ positioning တိကျမှုကို သေချာစေရန် စက်၏ dynamic ၊ static stability နှင့် processing accuracy အတွက် တိကျစွာစစ်ဆေးပြီး ပေးလျော်ပါသည်။.Ball bar စမ်းသပ်စက်တစ်ခုစီသည် စက်ဝိုင်းပုံမှန်ကန်မှုနှင့် စက်ဝိုင်းအစစ်အမှန်ကို ပြုပြင်ရန် ဗြိတိန် RENISHAW ကုမ္ပဏီမှ ဘောလုံးဘားစမ်းသပ်သူကို အသုံးပြုသည်။
chine ဂျီဩမေတြီတိကျမှု၊ စက်၏ 3D စက်လည်ပတ်မှုတိကျမှုနှင့် စက်ဝိုင်းတိကျမှုသေချာစေရန် စက်ဝိုင်းပုံဖြတ်ခြင်းစမ်းသပ်မှုများကို တစ်ချိန်တည်းလုပ်ဆောင်ပါ။

စက်ကိရိယာအသုံးပြုမှုပတ်ဝန်းကျင်
1.1 စက်ကိရိယာ ပတ်ဝန်းကျင် လိုအပ်ချက်
ပတ်ဝန်းကျင် အပူချိန်ကို အဆက်မပြတ် ထိန်းသိမ်းခြင်းသည် တိကျစွာ စက်ပစ္စည်းအတွက် မရှိမဖြစ် အရေးကြီးသော အချက်ဖြစ်သည်။
(1) ရရှိနိုင်သော ပတ်ဝန်းကျင် အပူချိန်မှာ -10 ℃ ~ 35 ℃ ဖြစ်သည်။ပတ်ဝန်းကျင် အပူချိန် 20 ℃ ရှိသောအခါ စိုထိုင်းဆသည် 40 ~ 75% ဖြစ်သင့်သည်။
(၂) သတ်မှတ်ထားသော အကွာအဝေးအတွင်း စက်ကိရိယာ၏ တည်ငြိမ်တိကျမှုကို ထိန်းထားနိုင်ရန်၊ အကောင်းဆုံး ပတ်ဝန်းကျင်အပူချိန်သည် အပူချိန် ကွာခြားချက် 15°C မှ 25°C ရှိရန် လိုအပ်ပါသည်။
± 2 ℃ / 24h ထက်မပိုသင့်ပါ။
1.2 ပါဝါထောက်ပံ့မှု ဗို့အား- 3-အဆင့်၊ 380V၊ ဗို့အားအတက်အကျ ± 10% အတွင်း ပါဝါထောက်ပံ့မှု အကြိမ်ရေ- 50HZ။
1.3 အသုံးပြုမှုဧရိယာရှိ ဗို့အားမတည်ငြိမ်ပါက၊ စက်ကိရိယာ၏ပုံမှန်လည်ပတ်မှုကိုသေချာစေရန်အတွက် စက်ကိရိယာအား ထိန်းညှိပါဝါထောက်ပံ့မှုတစ်ခု တပ်ဆင်ထားသင့်သည်။
၁.၄။စက်ကိရိယာတွင် ယုံကြည်စိတ်ချရသော မြေပြင်ရှိသင့်သည်- မြေစိုက်ဝါယာကြိုးသည် ကြေးနီဝါယာကြိုးဖြစ်ပြီး ဝါယာအချင်းသည် 10mm² ထက်မနည်းစေရ၊ နှင့် မြေပြင်ခံနိုင်ရည်မှာ 4 ohms ထက်နည်းသည်။
1.5 စက်ပစ္စည်းများ၏ ပုံမှန်လုပ်ငန်းဆောင်တာများကို သေချာစေရန်အတွက်၊ လေအရင်းအမြစ်၏ ဖိသိပ်ထားသောလေသည် လေအရင်းအမြစ်၏လိုအပ်ချက်များနှင့် မကိုက်ညီပါက၊ လေအရင်းအမြစ်သန့်စင်သည့်ကိရိယာအစုံ (dehumidification၊ degreasing၊ filtering) ကို မပြုလုပ်မီ ထည့်သွင်းသင့်သည်။ စက်၏လေဝင်ပေါက်။
၁.၆။စက်ပစ္စည်းများကို တိုက်ရိုက်နေရောင်ခြည်၊ တုန်ခါမှုနှင့် အပူရှိန်အရင်းအမြစ်များနှင့် ဝေးဝေးတွင် ထားသင့်ပြီး ကြိမ်နှုန်းမြင့်သည့် ဂျင်နရေတာများ၊ လျှပ်စစ်ဂဟေဆော်စက်များ စသည်တို့နှင့် ဝေးဝေးတွင် ထားသင့်သည်၊ သို့မှသာ စက်ထုတ်လုပ်မှု ချို့ယွင်းမှု သို့မဟုတ် စက်တိကျမှု ဆုံးရှုံးမှုကို ရှောင်ရှားသင့်သည်။
ဝန်ဆောင်မှုမတိုင်မီနှင့်အပြီး
1) လုပ်ငန်းမစမီ
ဖောက်သည်များထံမှ တောင်းဆိုချက်နှင့် လိုအပ်သော အချက်အလက်များကို လေ့လာပြီးနောက် ကျွန်ုပ်တို့၏ အင်ဂျင်နီယာများထံ တုံ့ပြန်ချက်မှတစ်ဆင့်၊ Bossman Technical team သည် သုံးစွဲသူများနှင့် နည်းပညာပိုင်းဆိုင်ရာ ဆက်သွယ်မှုနှင့် ဖြေရှင်းချက်ပုံစံများကို ပုံဖော်ပေးကာ သင့်လျော်သော machining solution နှင့် သင့်လျော်သော စက်များကို ရွေးချယ်ရာတွင် ဖောက်သည်အား ကူညီဆောင်ရွက်ပေးပါသည်။
2) ဝန်ဆောင်မှုအပြီး
A. တစ်နှစ်အာမခံဖြင့် စက်ကို တစ်သက်တာ ပြုပြင်ထိန်းသိမ်းမှုအတွက် ပေးဆောင်ရသည်။
B. စက်သို့ဦးတည်ရာဆိပ်ကမ်းသို့ရောက်ရှိပြီးနောက်တစ်နှစ်အာမခံကာလအတွင်း BOSSMAN သည် စက်ရှိလူလုပ်မဟုတ်သောချို့ယွင်းချက်အမျိုးမျိုးအတွက် အခမဲ့နှင့် အချိန်နှင့်တစ်ပြေးညီ ပြုပြင်ထိန်းသိမ်းမှုဝန်ဆောင်မှုများကို ဆောင်ရွက်ပေးမည်ဖြစ်ပြီး လူလုပ်မဟုတ်သောပျက်စီးမှုအစိတ်အပိုင်းများကို အချိန်နှင့်တစ်ပြေးညီ အစားထိုးလဲလှယ်ပေးမည်ဖြစ်ပါသည်။ အခကြေးငွေအာမခံကာလအတွင်း ပျက်ကွက်မှုများ ဖြစ်ပေါ်ပါက သင့်လျော်သော အခကြေးငွေဖြင့် ပြုပြင်ရမည်။
C.Technical ပံ့ပိုးမှု 24 နာရီအွန်လိုင်းတွင် TM, Skype, E-mail, ဆွေမျိုးမေးခွန်းများကိုအချိန်မီဖြေရှင်း။မဖြေရှင်းနိုင်ပါက BOSSMAN သည် ပြုပြင်ရန်အတွက် ဆိုက်ဆိုက်မြိုက်မြိုက်ရောက်ရှိလာရန် အရောင်းအပြီး အင်ဂျင်နီယာအား ချက်ချင်းစီစဉ်ပေးမည်ဖြစ်ပြီး ဝယ်ယူသူသည် VISA ၊ လေယာဉ်လက်မှတ်များနှင့် နေရာထိုင်ခင်းအတွက် ပေးဆောင်ရန် လိုအပ်ပါသည်။
ဖောက်သည်၏ဆိုက်